

Acceleration and deceleration method of six-degree-of-freedom swinging device based on Stewart platform
Patent Information
- Authority / Receiving Office
- CN · China
- Current Assignee / Owner
- 湖南宇正智能科技有限公司
- Publication Date
- 2021-03-02
Smart Images
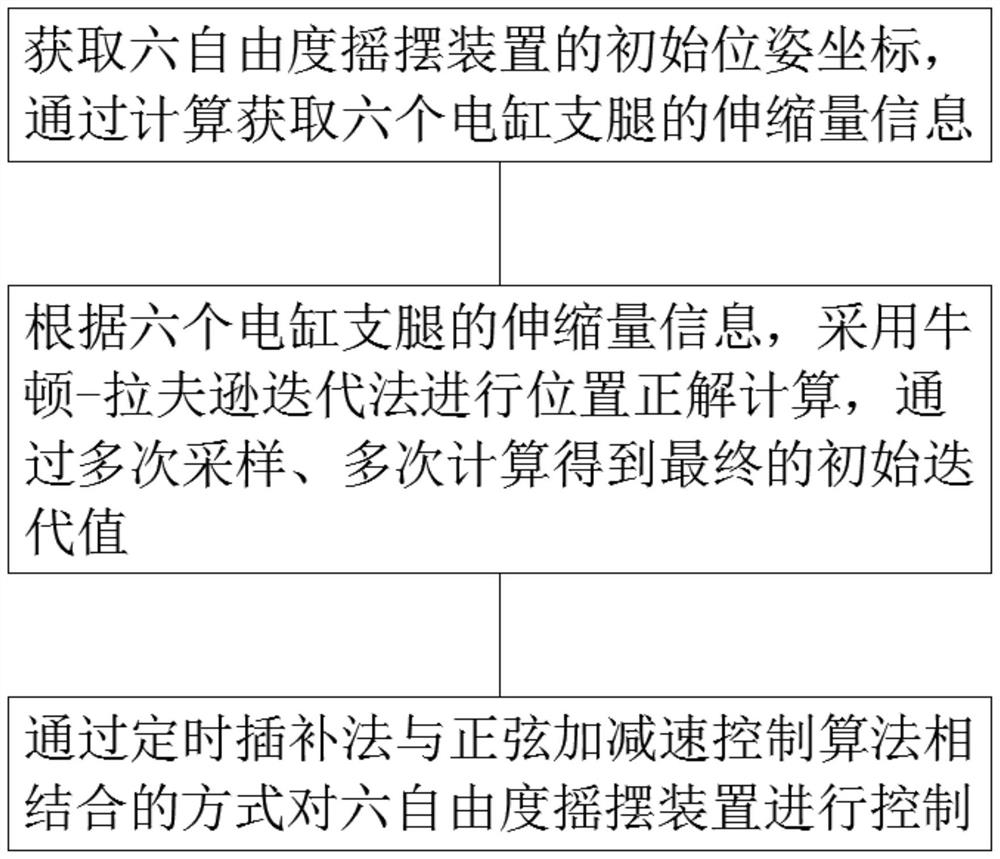
Figure 1 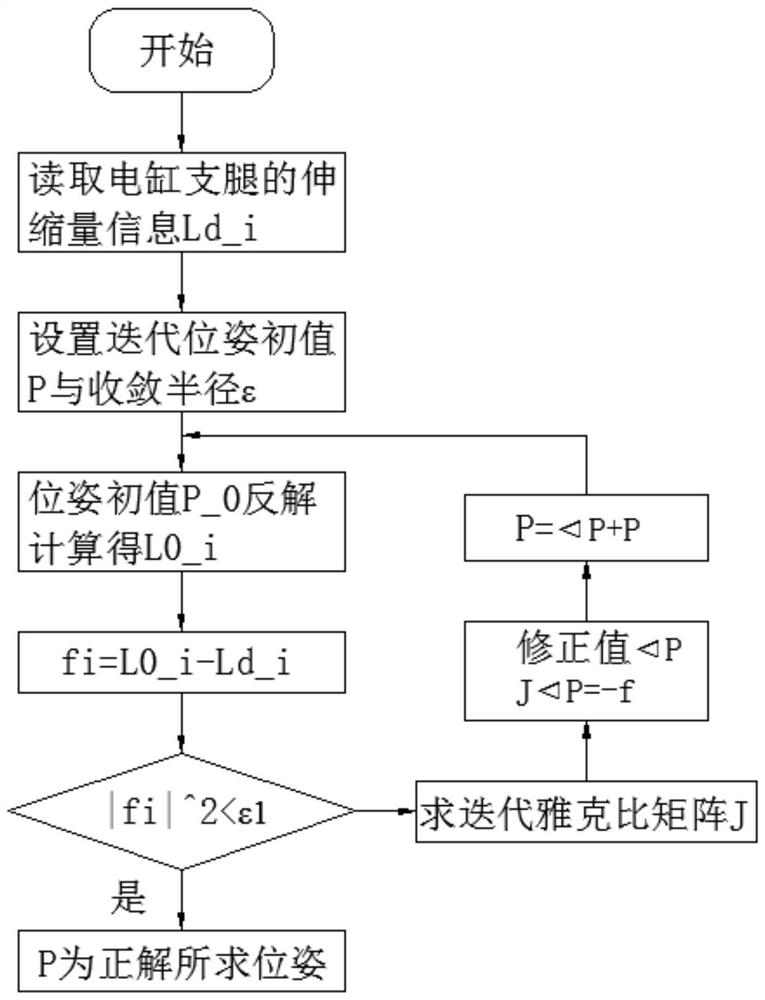
Figure 2
Abstract
Description
technical field
[0001] The invention relates to the technical field of motion platforms, in particular to an acceleration and deceleration method of a six-degree-of-freedom rocking device based on a Stewart platform. Background technique
[0002] The Stewart platform is a multi-input and multi-output control system with strong nonlinear coupling characteristics. The accuracy and real-time performance of its kinematics forward and reverse solution algorithm and the robustness of dynamic control determine the performance of its control system. The key, the six-axis Stewart platform control system of the transmission adopts the invention of computer + motion control card or motion controller and embedded controller.
[0003] The current six-degree-of-freedom rocking device of the Stewart platform is generally used as an experimental device to simulate the shaking posture of a ship in water, provide six-degree-of-freedom motion, and simulate three-axis space motion at most. How...