

Robot joint module driver and control method thereof
A technology of robot joints and control methods, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of large stiffness value of the reducer, difficult to obtain the stiffness value of the reducer, low relative torque accuracy, etc., and achieves small size. , The effect of improving joint control performance and torque control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045]The present invention will be described in detail below with reference to the accompanying drawings and preferred embodiments, and the purpose and effect of the present invention will become clearer. It should be understood that the specific embodiments described here are only used to explain the present invention and are not intended to limit the present invention.
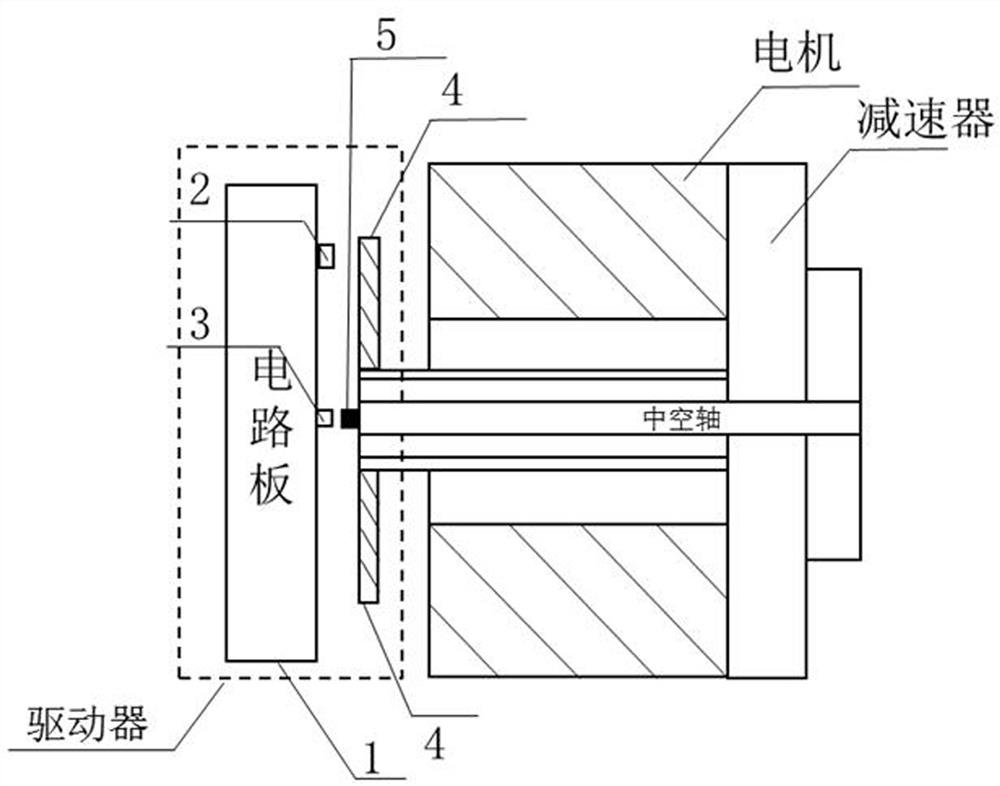
[0046] Such as figure 1 As shown, it is a schematic diagram of the structure of the joint module based on the driver of the present invention. The driver of the present invention includes a driver circuit board 1, a grating code disc 4 and a magnetic block 5, and the grating code disc 4 is installed on the rotating shaft of the motor end of the joint module. , the magnetic block 5 is fixed on the output hollow rotating shaft of the reducer of the joint module; the driver circuit board 1 is fixed on the joint module, which includes a position detection module composed of a photoelectric induction unit 2 and a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More