Internal forklift parking robot control system with stop arm structure and method
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A control system and robot technology, applied in the field of parking robots, can solve the problems that the vehicle cannot be squeezed on the fork arm, and the vehicle is easy to slip.
Inactive Publication Date: 2021-03-09
JIANGSU LITTLE WHITE RABBIT INTELLIGENT MFG SCI INC
View PDF0 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0004] In view of the above-mentioned technical problems in the prior art, one of the purposes of the present invention is to solve the problem that the existing two-jaw parking robot cannot squeeze the vehicle onto the fork arm when carrying a vehicle with a large difference between the front and rear counterweights. In order to solve the technical problems of the vehicle and the problem that the vehicle is easy to slip, a kind of internal forklift parking robot with a stop arm structure and its control system and method are designed
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
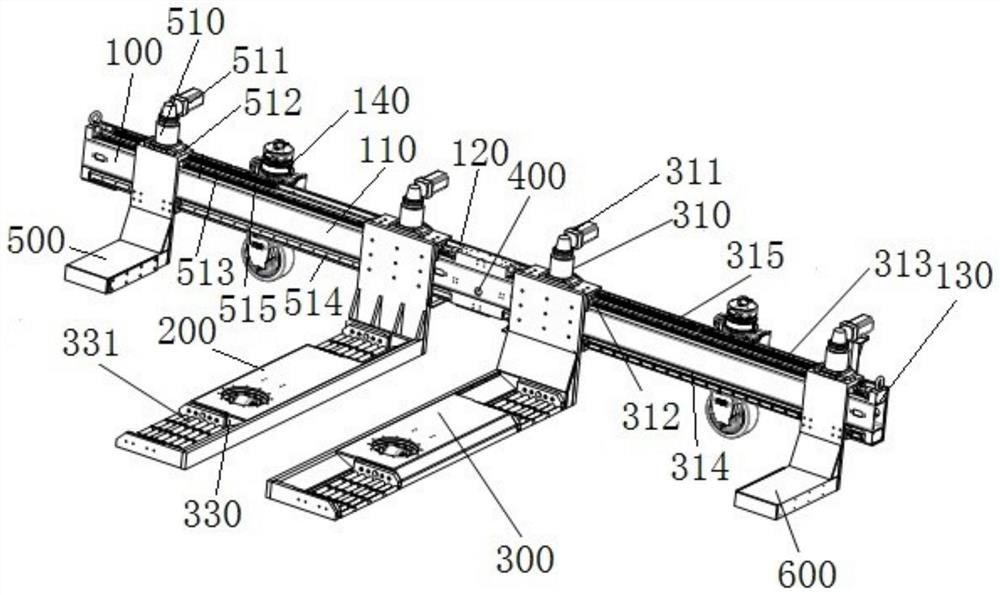
[0079] This embodiment relates to a parking robot with a stop arm structure, such as figure 1 As shown, the robot includes:
[0081] Active running device 140, the active running device 140 is installed on the vehicle frame 100, and is used to drive the vehicle frame 100 to move;
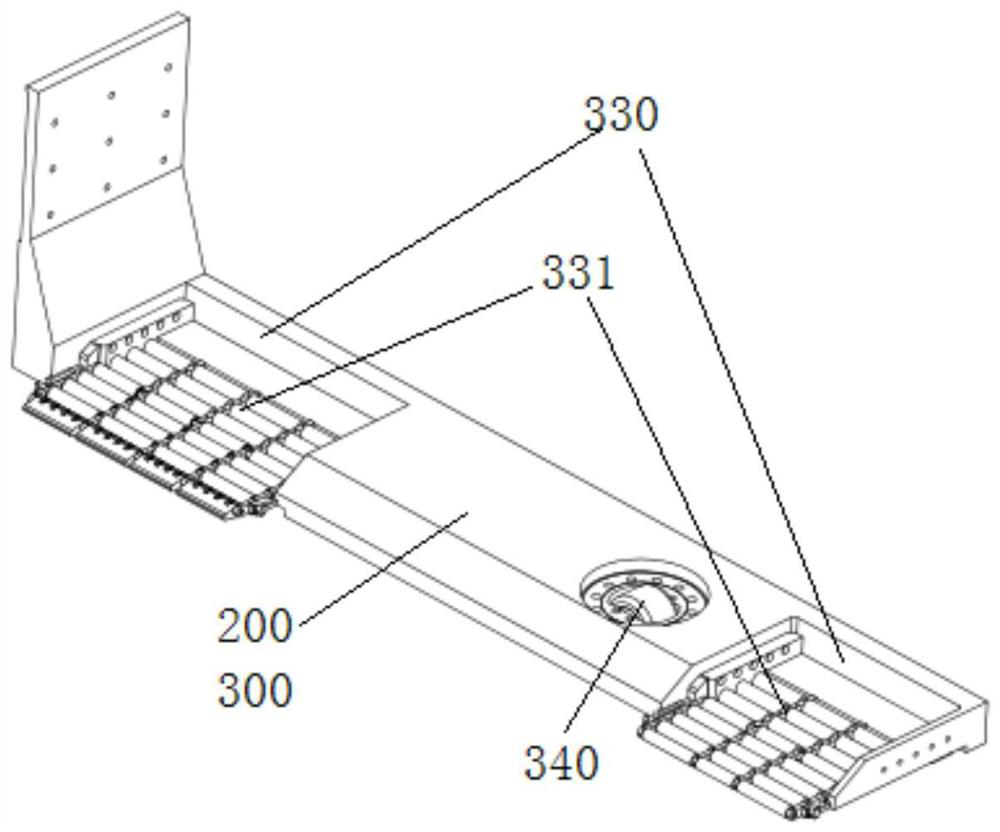
[0082] The left fork arm 200 and the right fork arm 300 with the same symmetrical structure are installed on the same side of the vehicle frame 100 respectively, and the distance between them is adjustable;
[0083] Universal wheel 340, the universal wheel 340 is installed on the left fork arm 200 and the right fork arm 300, to meet the driving requirements of the parking robot, and as a supporting structure;
[0084] The left arm 500 and the right arm 600 with the same symmetrical structure, the left arm 500 and the right arm 600 are movably installed on the vehicle frame 100, respectively located ...
Embodiment 2
[0099] In the embodiment, it relates to a parking robot with a stop arm structure, such as Figure 8 shown. The parking robot has a similar structure to the parking robot in Embodiment 1, only the lengths of the left arm 500 and the right arm 600 are different.
[0100] Wherein, the lengths of the left blocking arm 500 and the right blocking arm 600 are similar to the lengths of the left yoke 200 and the right yoke 300 .
Embodiment 3
[0102] This embodiment relates to a control system and a control method applicable to Embodiment 1 or 2.
[0103] like Figure 7 As shown, the control system of the parking robot with stop arm structure includes a traveling module, a fork arm moving module, a stop arm moving module, a measuring module, a navigation module and a general controller.
[0104] The traveling module includes an active traveling device 140 and a universal wheel 340, which are used to drive the parking robot to move according to the traveling control instruction issued by the general controller;
[0105] The yoke moving module includes a yoke moving device 310 for driving the yoke to move;
[0106] The blocking arm moving module includes a blocking arm moving device 510 for driving the blocking arm to move;
[0107] The measurement module, including photoelectric sensors, is used to detect the wheelbase and wheel diameter of the vehicle, and calculate the stopping distance;
[0108] The navigation ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention belongs to the technical field of parking robots, and discloses an internal forklift parking robotcontrol system with a stop arm structure and a method. The internal forklift parking robotcontrol system comprises an advancing module, a fork arm moving module, a blocking arm moving module, a measuring module, a navigation module and a master controller. The advancing module is usedfor driving a parking robot to move according to an advancing control instruction sent by the master controller; the fork arm moving module is used for driving fork arms to move; the stop arm moving module is used for driving stop arms to move; the measuring module is used for detecting the wheelbase of vehicles; the navigation module is used for calculating an advancing route of the parking robot; and the master controller comprises an input and output unit, a control instruction unit, a distance judgment unit and a resistance judgment unit. After the stop arms make contact with a tire, the stop positions of the fork arms are judged according to the positions of the stop arms, the states of the tire and the corresponding fork arms are directly and effectively reflected, and the situationthat the tire falls off again due to excessive movement of the fork arms is avoided.
Description
technical field [0001] The invention belongs to the technical field of parking robots, and relates to an automatic equipment for moving vehicles to or from a parking space in a parking lot, in particular to a control system and a control method for an internal forklift parking robot with a stop arm structure. Background technique [0002] With the development of the society and the improvement of the economy, the number of cars has increased sharply. The family car has become a necessary means of transportation for every household. The problem of difficult parking in every city has also followed. The driver's own method of finding a parking space to park can no longer meet the parking needs of various cities now. In order to reduce the time for finding a parking space, parking robots with different structures have appeared on the market. [0003] Among them, a parking robot that lifts the vehicle by inserting into the bottom of the vehicle from the side and clamping the tir...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More