

A Predictive Control Method for Trajectory Control Applied to Autonomous Driving
A trajectory control and control method technology, which is applied in the field of predictive control of trajectory control, can solve the problems of insufficient use of future trajectory information, large steering fluctuations, and large tracking errors, so as to reduce frequent changes in corners, reduce lateral errors, The effect of reducing the number of downtime or performance degradation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0077] In order to facilitate those skilled in the art to understand and implement the present invention, the specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments:
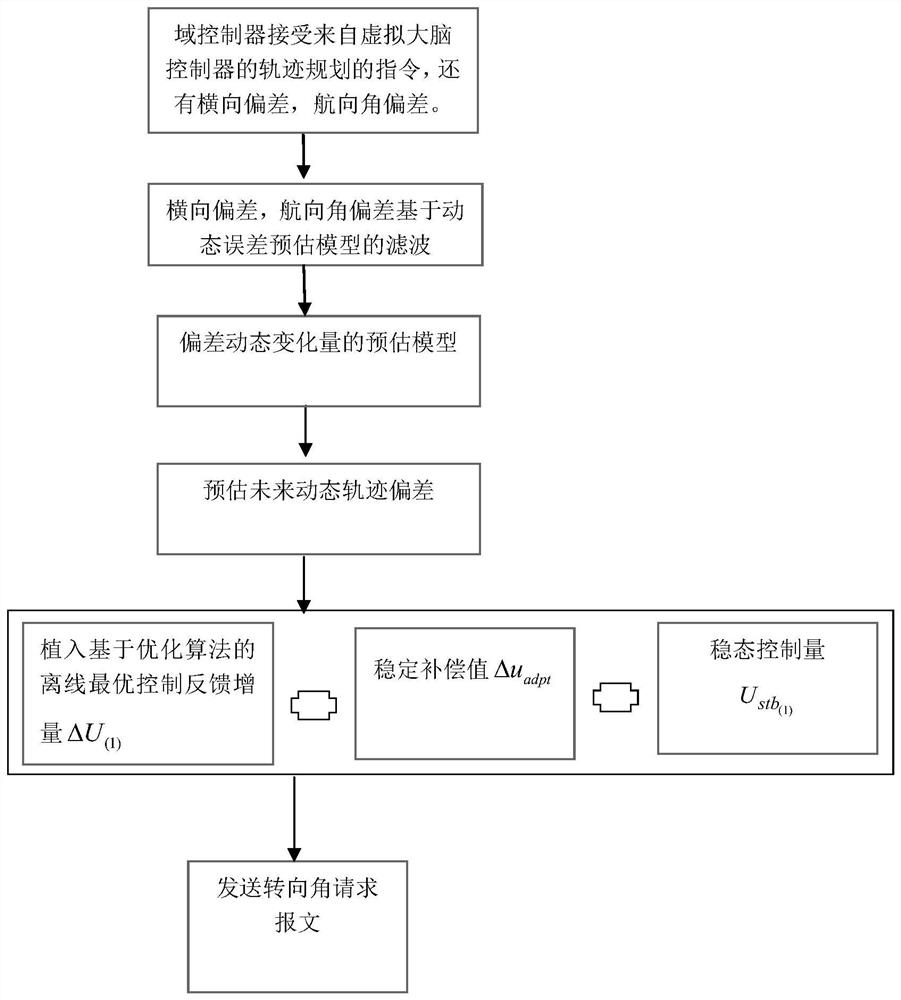
[0078] like figure 1 As shown, a predictive control method for trajectory control applied to automatic driving includes the following steps:
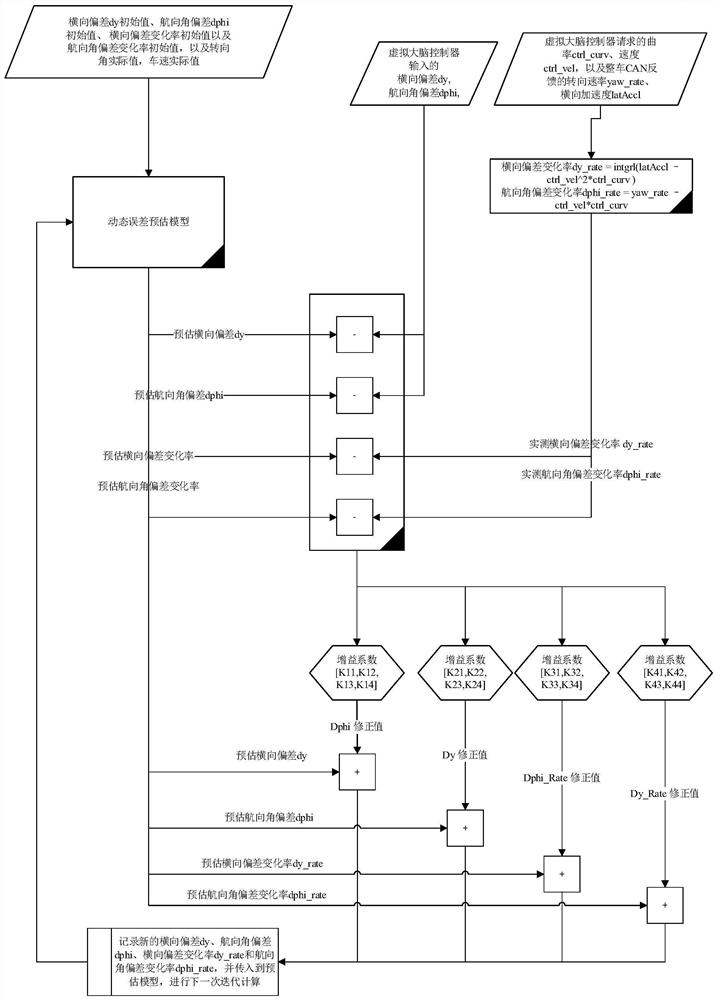
[0079] Step 1: The domain controller receives real-time signals from the virtual brain controller and the vehicle CAN network;
[0080] The signals input by the virtual brain controller include the coordinate information of the planned trajectory, the motion information, and the position error between the current vehicle position and the reference trajectory;
[0081] The coordinate signal of the planned trajectory includes: abscissa y, ordinate x and steering angle phi;
[0082] The motion information includes: the speed, acceleration, curvature, and rate of curvature change o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More