An Underwater Target Location Method Based on Improved Frequency Difference of Arrival
A positioning method and underwater target technology, which is applied in the field of underwater target positioning based on improved arrival frequency difference, can solve the problems of low signal frequency resolution and inability to accurately measure target azimuth, so as to improve positioning accuracy and reduce design difficulty Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
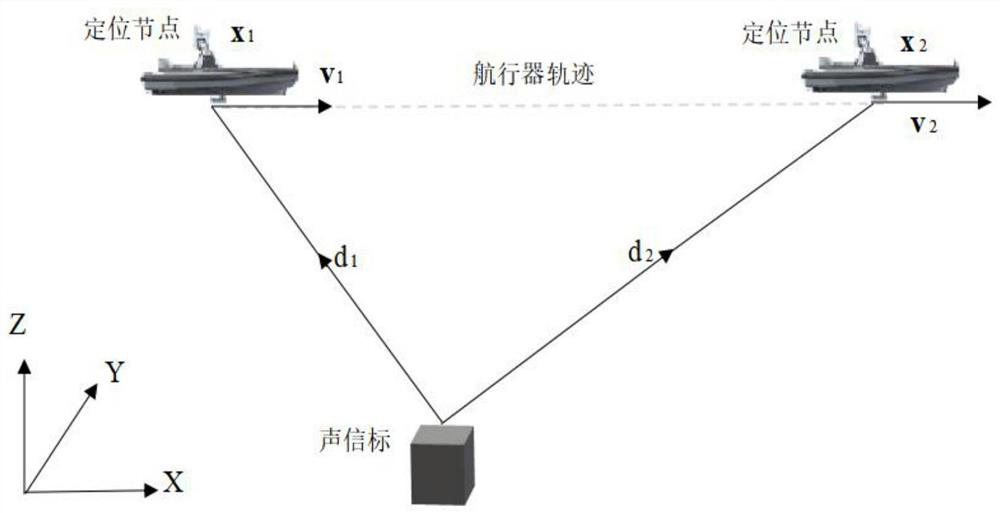
[0052] The underwater target localization method based on the improved arrival frequency difference refers to the Doppler frequency shift of the arrival signal due to the relative motion between the target and the underwater mobile platform. The technique of the location of the target. Its scene situation diagram is as follows figure 1As shown, the location of the underwater acoustic beacon is determined primarily by a single maneuvering vehicle receiving the signals transmitted by the acoustic beacon at two locations. In the figure, the aircraft travels along the preset route at a certain speed, and the acoustic beacon emits acoustic pulse signals at a certain period. 1 , x 2 The location (locating node) receives the ping signal. The underwater target location method based on the improved arrival frequency difference has a wide range of application prospects. Reconnaissance, search and interception of enemy underwater targets.
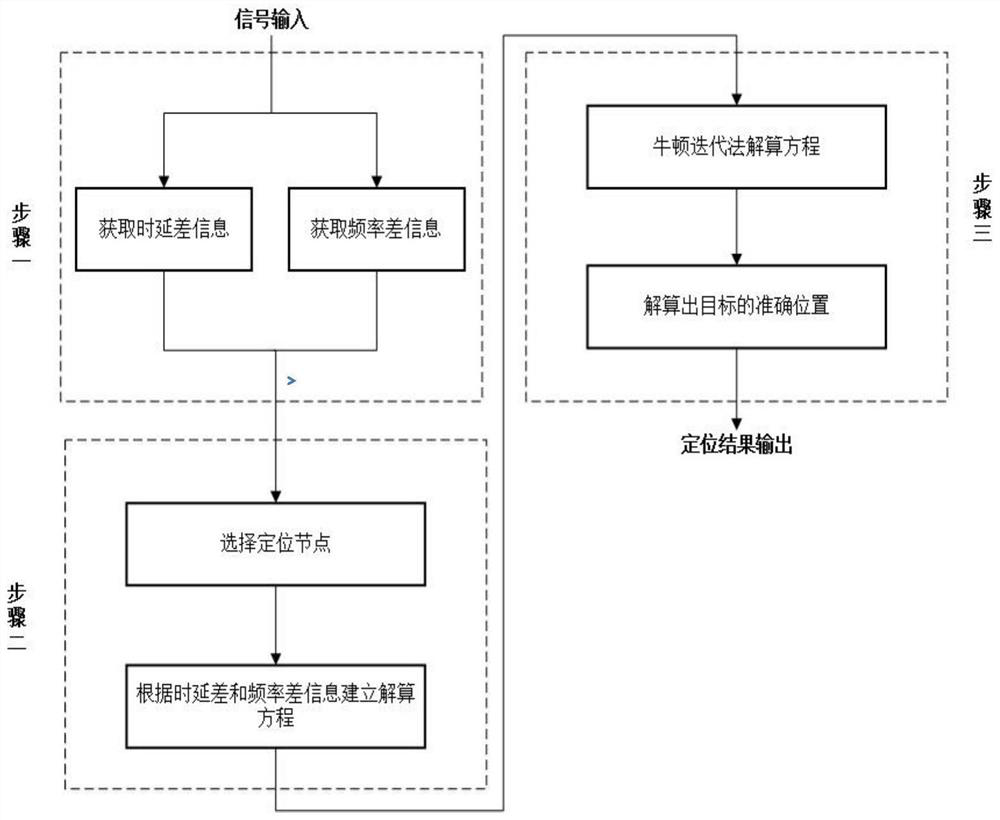
[0053] A method for locating an underwater...
Embodiment 2
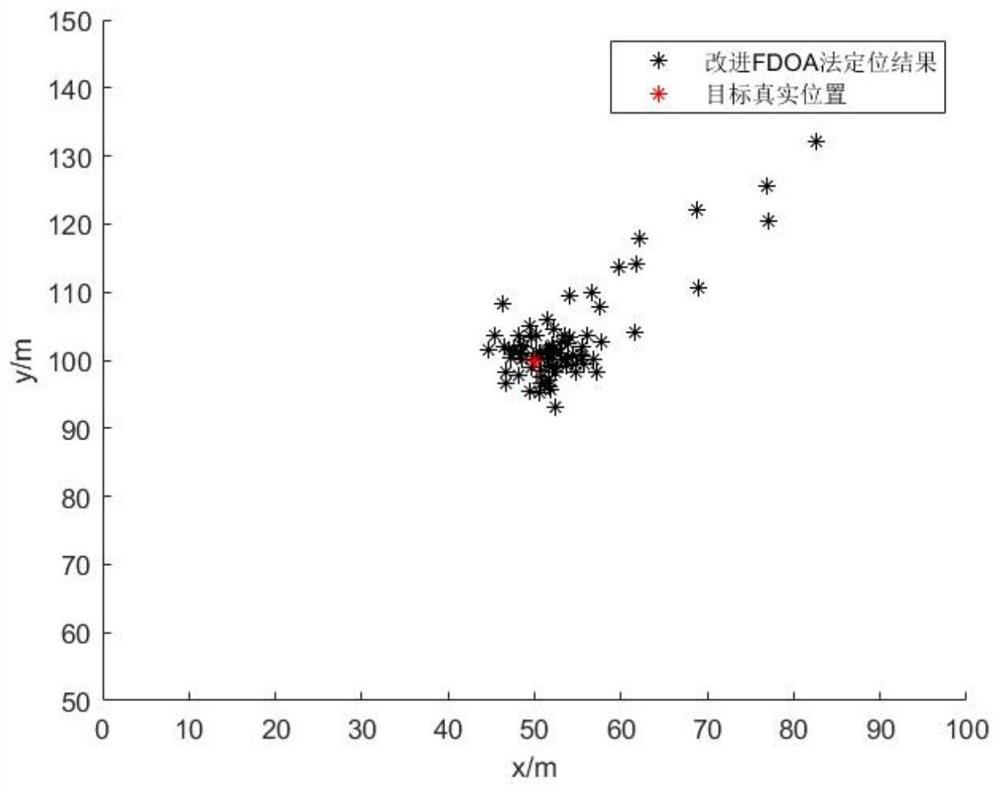
[0094] The simulation parameters are as follows: without loss of generality, the coordinates of the target are set to x t =[0,200,50], the track of the motorized positioning platform is a straight track, the depth is 0m, the motorized positioning platform moves at a uniform speed, and the speed is 5m / s. The estimation error of each input parameter is: the measurement error of frequency difference information is 0.5Hz, the measurement error of time delay difference information is 1ms, the measurement error of sound speed is 2m / s, the coordinate error of positioning node is 1.5m, and the speed measurement error of motorized positioning platform is 1%. Other parameters are set as follows: the speed of sound is 1500m / s, the frequency of the acoustic beacon signal is 10kHz, and the signal period is 1s.
[0095] The positioning method involved in the present invention is used to estimate the position of the acoustic beacon. The real-time solution results are as image 3 As shown,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More