

Optimal joint acceleration and deceleration calculation method and device, and application thereof
A deceleration and acceleration technology, applied in the field of optimal joint acceleration and deceleration calculation, can solve problems such as difficult, difficult to implement, difficult to manually set, etc., to achieve the effect of improving the robot beat
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
[0037] In the description of the present invention, unless otherwise clearly defined, words such as setting, installation, and connection should be understood in a broad sense, and those skilled in the art can reasonably determine the specific meanings of the above words in the present invention in combination with the specific content of the technical solution.
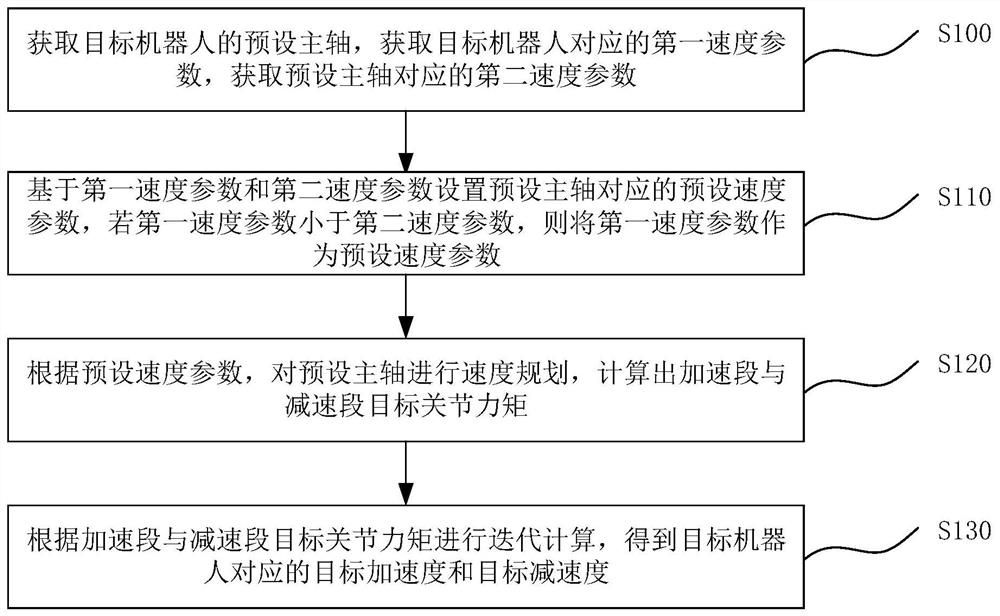
[0038] The beat of the robot directly affects the efficiency of the industrial field process, and it is of great significance to improve the beat of the robot. There are many way...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More