

A kind of optimization method, device, device and readable storage medium of driving trajectory
An optimization method and technology of driving trajectory, applied in the direction of measuring devices, navigation, instruments, etc., can solve problems such as high algorithm complexity, no solution, difference in formation order, etc., and achieve low complexity, ensure feasibility, and ensure consistency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
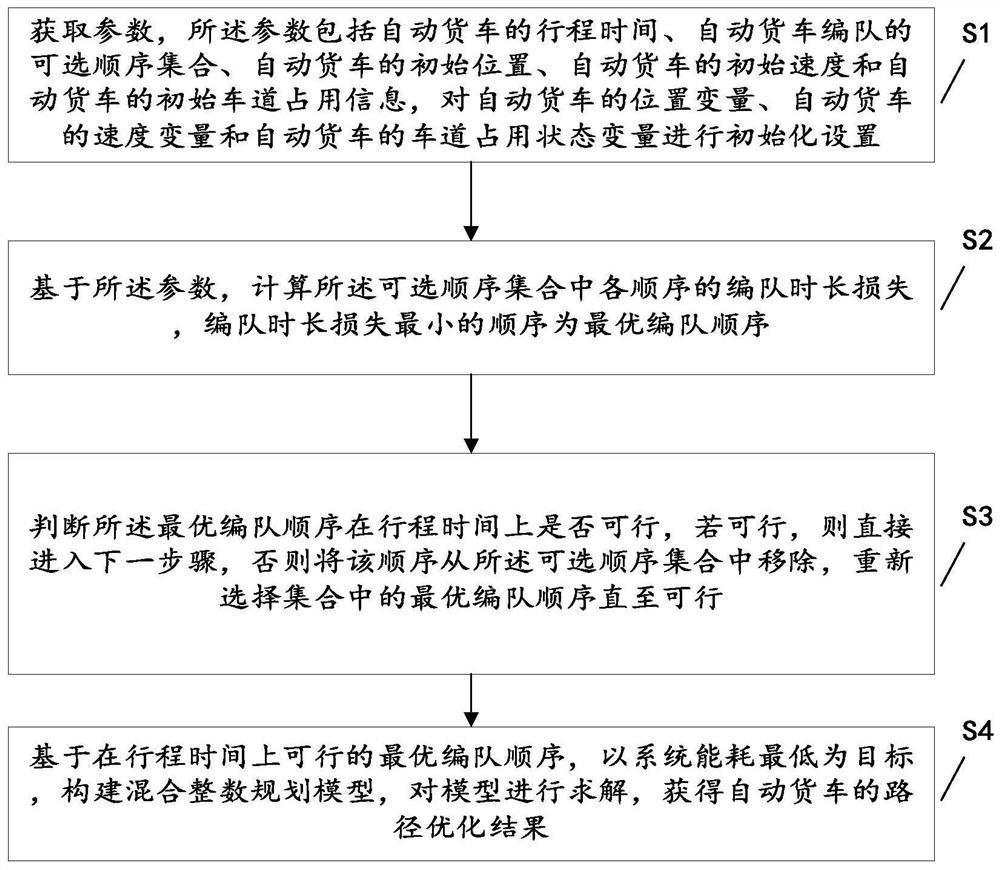
[0189] Such as figure 1 As shown, this embodiment provides a method for optimizing a driving trajectory, and the method includes step S1, step S2, step S3 and step S4.
[0190] Step S1. Acquire parameters, the parameters include the travel time of the automatic truck, the optional sequence set of the automatic truck formation, the initial position of the automatic truck, the initial speed of the automatic truck and the initial lane occupancy information of the automatic truck, the position of the automatic truck variable, the speed variable of the automatic truck and the lane occupancy state variable of the automatic truck are initialized;
[0191] Step S2. Based on the parameters, calculate the formation duration loss of each sequence in the optional sequence set, and the sequence with the smallest formation duration loss is the optimal formation sequence;
[0192] Step S3. Judging whether the optimal formation sequence is feasible in terms of travel time, if feasible, proce...
Embodiment 2
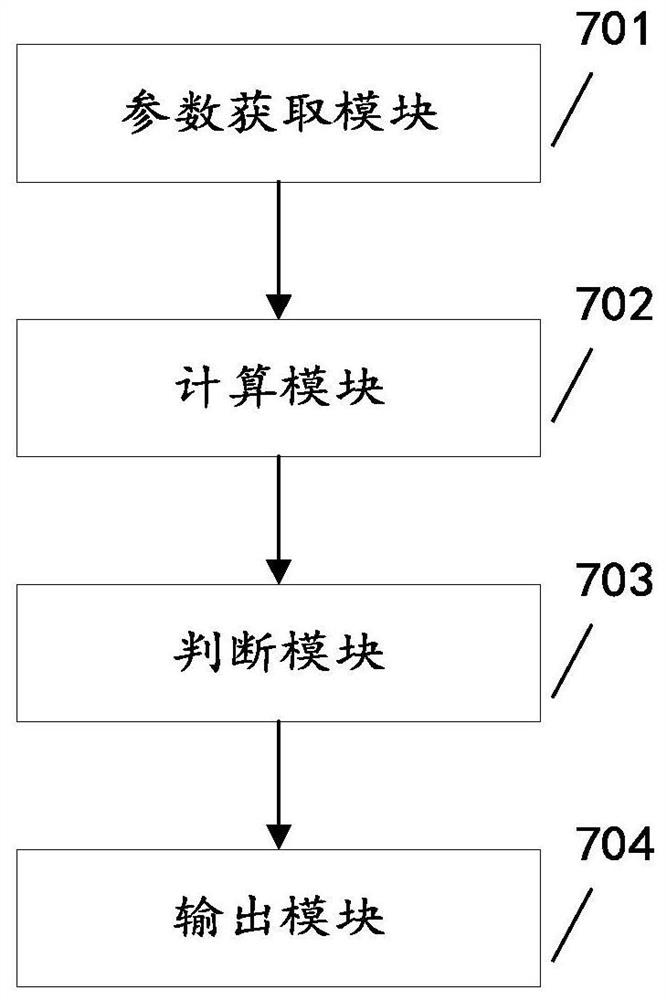
[0318] Such as image 3 As shown, this embodiment provides a driving trajectory optimization device, which includes a parameter acquisition module 701 , a calculation module 702 , a judgment module 703 and an output module 704 .
[0319] The parameter acquiring module 701 is used to acquire parameters, the parameters including the travel time of the automatic truck, the optional sequence set of the automatic truck formation, the initial position of the automatic truck, the initial speed of the automatic truck and the initial lane occupancy information of the automatic truck, for The position variable of the automatic truck, the speed variable of the automatic truck and the lane occupancy state variable of the automatic truck are initialized;
[0320] The calculation module 702 is configured to calculate the formation duration loss of each sequence in the optional sequence set based on the parameters, and the sequence with the smallest formation duration loss is the optimal for...
Embodiment 3
[0327] Corresponding to the above method embodiments, the embodiments of the present disclosure further provide a device for optimizing a driving trajectory. The device for optimizing a driving trajectory described below and the method for optimizing a driving trajectory described above may be referred to in correspondence.
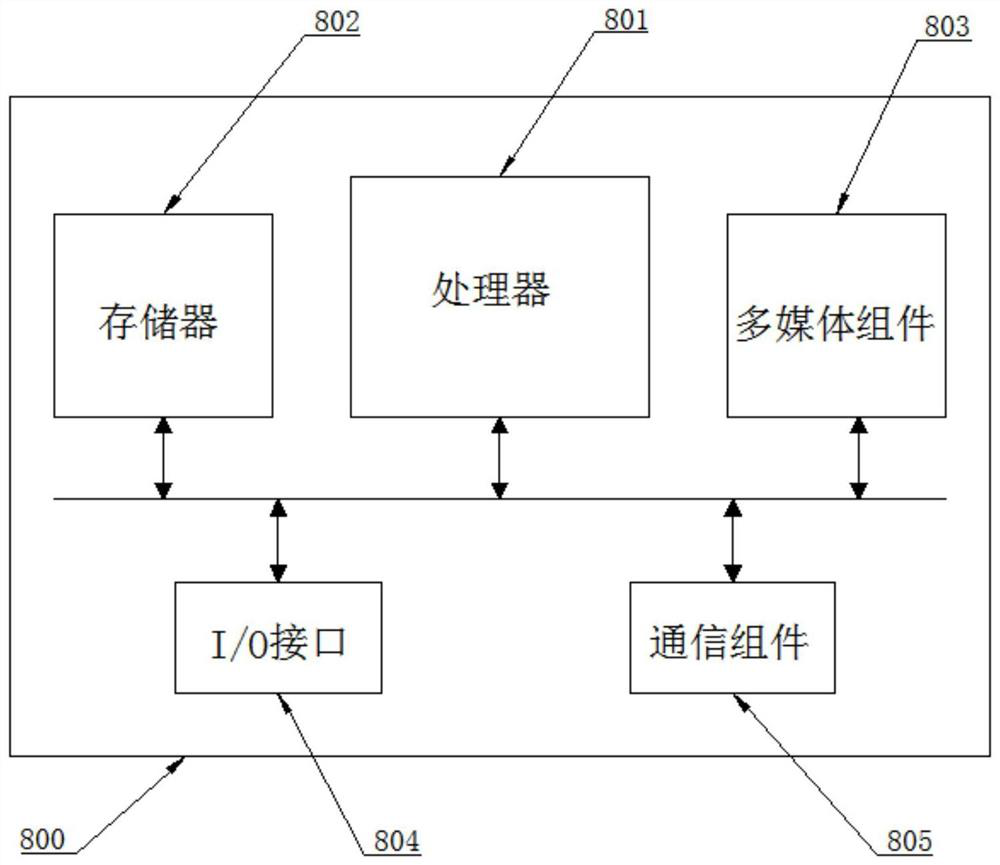
[0328] Figure 4 It is a block diagram of a driving trajectory optimization device 800 shown according to an exemplary embodiment. Such as Figure 4 As shown, the electronic device 800 may include: a processor 801 and a memory 802 . The electronic device 800 may also include one or more of a multimedia component 803 , an input / output (I / O) interface 804 , and a communication component 805 .
[0329] Wherein, the processor 801 is used to control the overall operation of the electronic device 800 to complete all or part of the steps in the above-mentioned method for optimizing the driving trajectory. The memory 402 is used to store various types of data ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More