

Cleaning path planning method, cleaning path planning device and cleaning robot
A cleaning robot and path planning technology, applied in the field of cleaning robots, can solve problems such as poor cleaning effect of cleaning robots, achieve comprehensive cleaning and improve cleaning effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
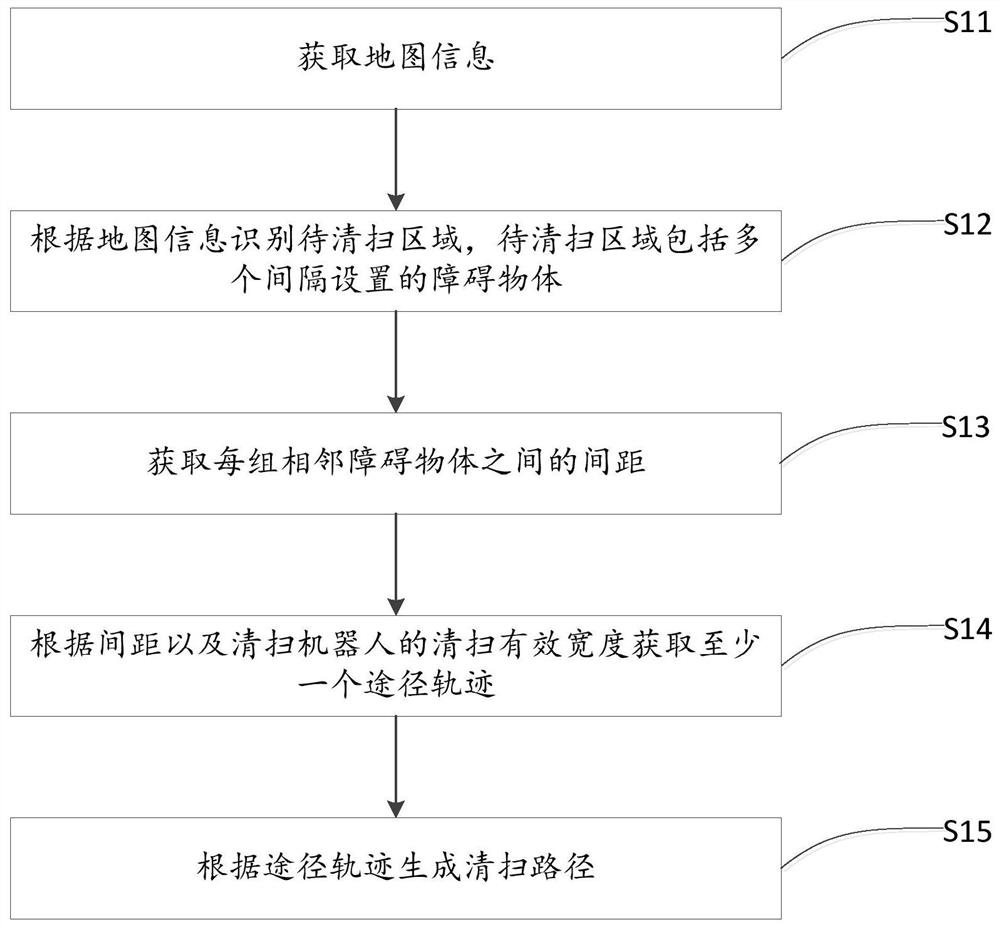
[0036] see figure 1 and figure 2 , a cleaning path planning method, the cleaning path planning method includes:
[0037] Step 11, obtaining map information;
[0038] Step 12, identifying the area to be cleaned according to the map information, and the area to be cleaned includes a plurality of obstacles arranged at intervals;
[0039] Step 13, obtaining the distance between each group of adjacent obstacle objects;
[0040] Step 14, obtaining at least one path trajectory according to the spacing and the cleaning effective width of the cleaning robot; and
[0041] Step 15, generating a cleaning path according to the path trajectory.
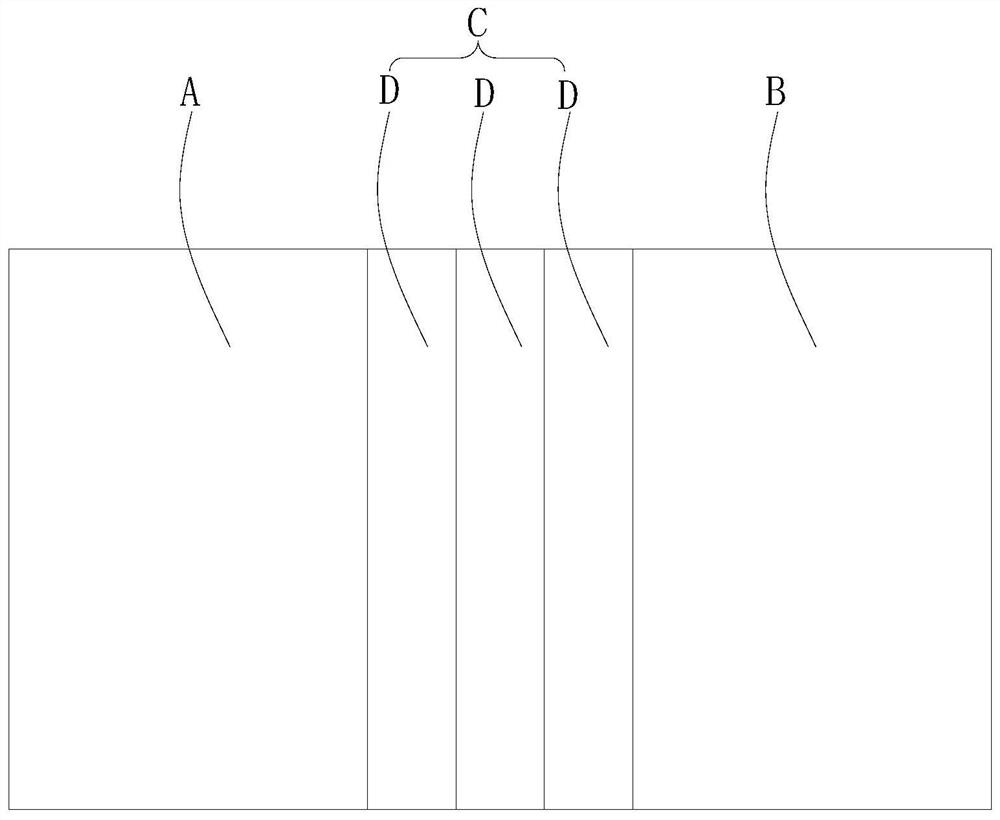
[0042] In the embodiment of the present invention, firstly, the map information of the area to be cleaned is acquired through the database or the map information recorded after the cleaning robot walks around the area to be cleaned. Subsequently, the map information is recognized and the obstacles on the map information are marked. The obstac...
Embodiment 2
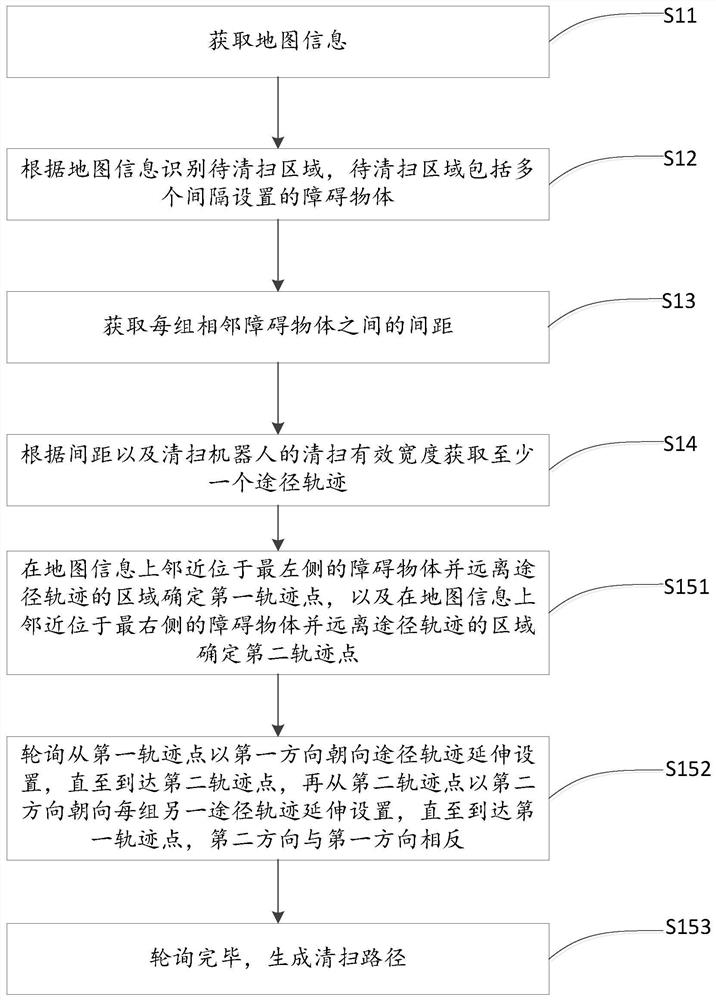
[0054] see further Figure 3 to Figure 7 , in the case where the path trajectories between adjacent obstacle objects are set to be in the same group, step S15 includes:
[0055] Step S151: Determine the first track point on the map information in an area adjacent to the leftmost obstacle object and far away from the passing track, and determine the second track point on the map information in an area adjacent to the rightmost obstacle object and far away from the passing track point;
[0056] Step S152: Polling extends the setting from the first track point to the path track in the first direction until reaching the second track point, and then extends the setting from the second track point to each group of another track track in the second direction until reaching the second track point A track point, the second direction is opposite to the first direction;
[0057] Step S153: After the polling is completed, a cleaning path is generated.
[0058] In such an embodiment, th...
Embodiment 3
[0068] see Figure 8 , the cleaning path planning method also includes the following steps:
[0069] Step S16: Obtain the turning radius of the cleaning robot;
[0070] Step S17: Polling starts from the first track point in the first direction according to the turning radius and sequentially selects and extends to the corresponding route track settings until reaching the second track point, and then starts from the second track point in the second direction according to the turning radius And choose to extend to another route track extension setting corresponding to each group in turn, until reaching the first track point;
[0071] Wherein, if the turning radius is greater than the preset value, it is determined to step over the current adjacent obstacle object and extend to the first trajectory point or the second trajectory point.
[0072] In such an embodiment, each cleaning robot is provided with a turning radius, and then the turning radius is compared, and when the tur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More