

Intelligent trajectory tracking control method for mobile robot
A mobile robot and trajectory tracking technology, applied in the control field, can solve the problems of difficult modeling of mobile robots, low feasibility, and the model cannot completely replace the nonlinear robot model, and achieve the effect of good trajectory tracking effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In order to make the purpose, technical solution and advantages of the present invention clearer, the technical solution of the present invention will be further described below in conjunction with the accompanying drawings and actual experiments.
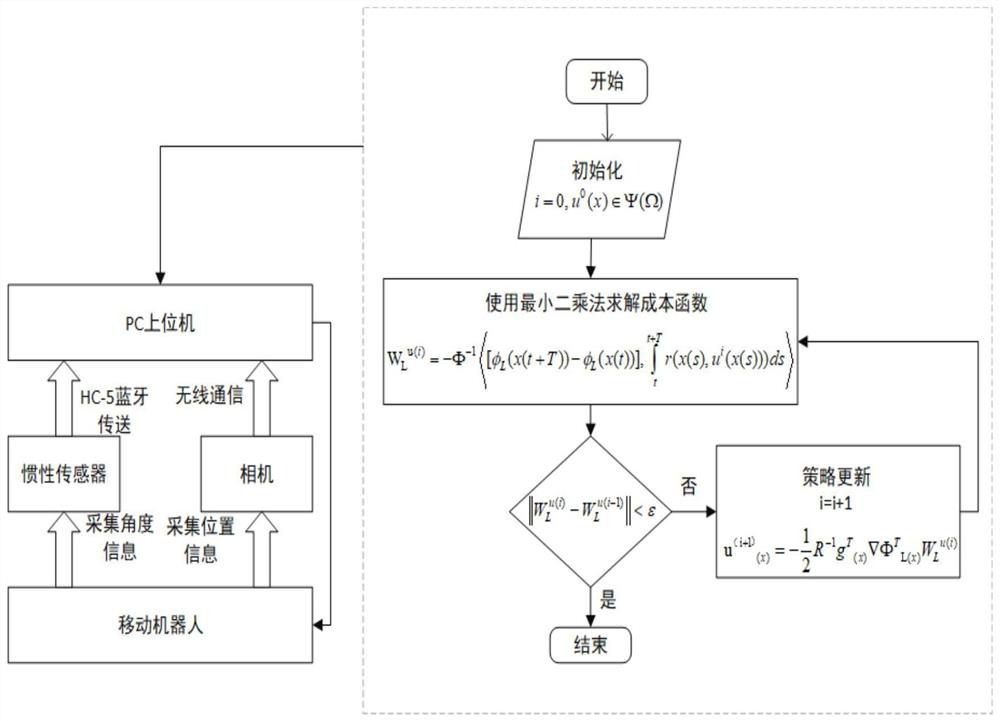
[0060] refer to Figure 1-Figure 4 , an intelligent trajectory tracking control method for mobile robots. For a given mobile robot model, use the convergence of the least squares method to estimate the weights; and update the weights of the controller by introducing neural networks and strategy iteration methods in reinforcement learning , to find the optimal value function.
[0061] The intelligent trajectory tracking control method of the mobile robot of the present embodiment comprises the following steps:
[0062] 1) Build a mobile robot nonlinear system;
[0063] 2) Initialize the state variables of the system and give the initial strategy;
[0064] 3) Utilize the reinforcement learning strategy iteration method to upd...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More