Control method and control device of unmanned vehicle and unmanned vehicle
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A technology of an unmanned vehicle and a control method, applied in the control method and control device of an unmanned vehicle, and the field of unmanned vehicles, can solve problems such as vehicle rollover and vehicle collision.
Pending Publication Date: 2021-07-23
YINLONG ENERGY CO LTD +1
View PDF0 Cites 3 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0004] Embodiments of the present invention provide a control method and control device for an unmanned vehicle, and an unmanned vehicle, so as to at least solve the problem of unmanned vehicles in the factory park in the related art, which are prone to appear when changing lanes in the park. Technical problems with rollovers or vehicle collisions
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0026] The embodiment of the present invention can be applied to various unmanned vehicles, and the types of unmanned vehicles include but not limited to: park logistics vehicles, new energy vehicles, automobiles, and trucks. Each type of unmanned vehicle has different body parameters and scannable information. When analyzing park road conditions, road signs, lane lines, and other vehicle information and obstacles, the parameters used are different. According to various types of vehicles The specific situation is adjusted by itself.
[0027] On unmanned vehicles, it can be integrated: control platform, camera device, sensing equipment (including distance sensor, sensing equipment), safety warning device, etc.
[0028] According to an embodiment of the present invention, an embodiment of a control method for an unmanned vehicle is provided. It should be noted that the steps shown in the flow chart of the accompanying drawings can be executed in a computer system such as a set of ...
Embodiment 2
[0063] The control device for an unmanned vehicle involved in this embodiment includes a plurality of implementation units, and each implementation unit corresponds to each implementation step in the first embodiment above.
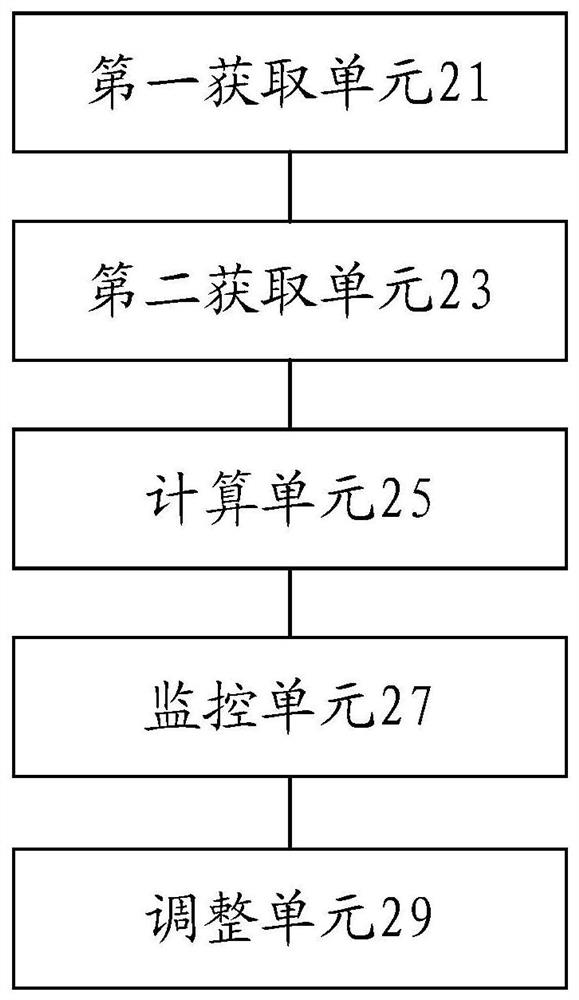
[0064] figure 2 is a schematic diagram of an optional control device for an unmanned vehicle according to an embodiment of the present invention, such as figure 2 As shown, the control device may include: a first acquisition unit 21, a second acquisition unit 23, a calculation unit 25, a monitoring unit 27, and an adjustment unit 29, wherein,
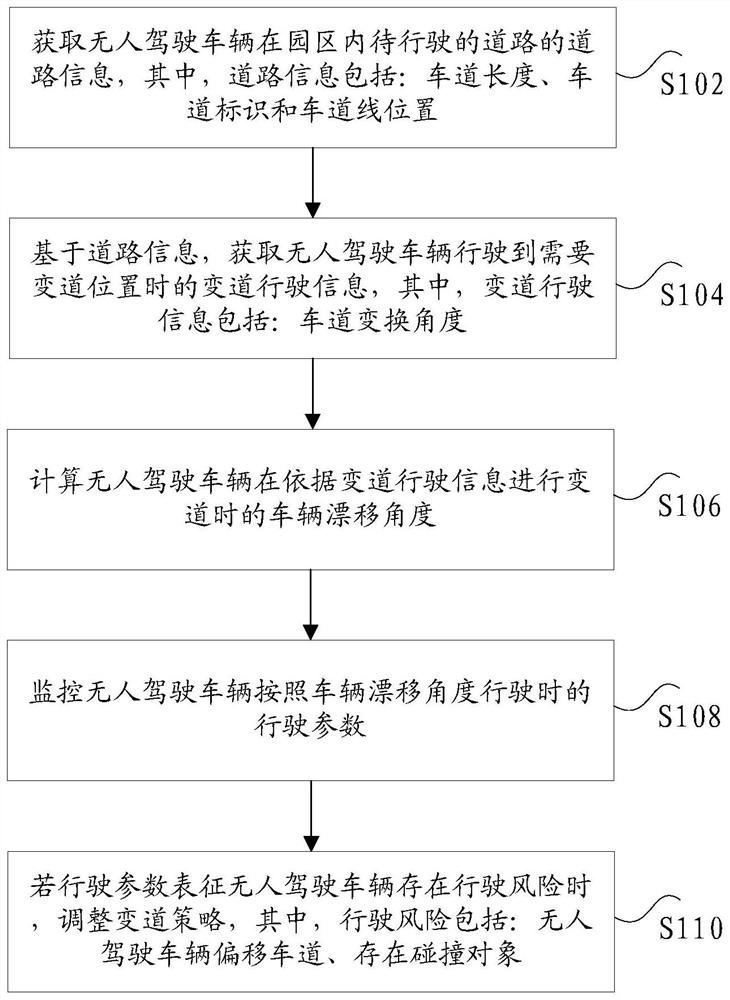
[0065] The first acquisition unit 21 is used to acquire road information of the road where the unmanned vehicle is to drive in the park, wherein the road information includes: lane length, lane marking and lane line position;
[0066] The second acquiring unit 23 is configured to acquire lane-changing information based on road information when the unmanned vehicle travels to a position where lane-changing is req...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a control method and device of an unmanned vehicle and the unmanned vehicle. The control method comprises the following steps: obtaining road information of a road on which an unmanned vehicle is to be driven in a park, the road information comprising a lane length, a lane identifier and a lane line position; based on the road information, obtaining lane changing driving information when the unmanned vehicle drives to a lane changing position, and the lane changing driving information comprises a lane changing angle; calculating a vehicle drift angle when the unmanned vehicle changes a lane according to the lane change driving information; monitoring driving parameters of the unmanned vehicle when the unmanned vehicle is driven according to the vehicle drift angle; if the driving parameters represent that the driverless vehicle has driving risks, adjusting a lane changing strategy, and the driving risks include that the driverless vehicle deviates from a lane and a collision object exists.
Description
technical field [0001] The present invention relates to the technical field of vehicle control, in particular, to a control method and device for an unmanned vehicle, and an unmanned vehicle. Background technique [0002] In related technologies, with the continuous development and maturity of automation control technology, unmanned driving technology is also developing continuously in terms of vehicle control. At present, in terms of unmanned driving, unmanned driving on urban roads is often considered. , the design of urban roads is relatively standardized, and vehicles have clear directions and road guidance signs when driving. The problem of lane changing in a specific environment such as in the park. In this case, when the vehicle in the factory park is controlled for autonomous driving, it is easy to cause the vehicle to roll over or collide when the vehicle changes lanes in the park. , causing greater damage to the unmanned vehicle and affecting the normal use of the...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More