Articulated-arm robot
A robot and articulated arm technology, applied in the field of articulated arm robots, can solve problems affecting the interaction efficiency of robots and achieve efficient interaction effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
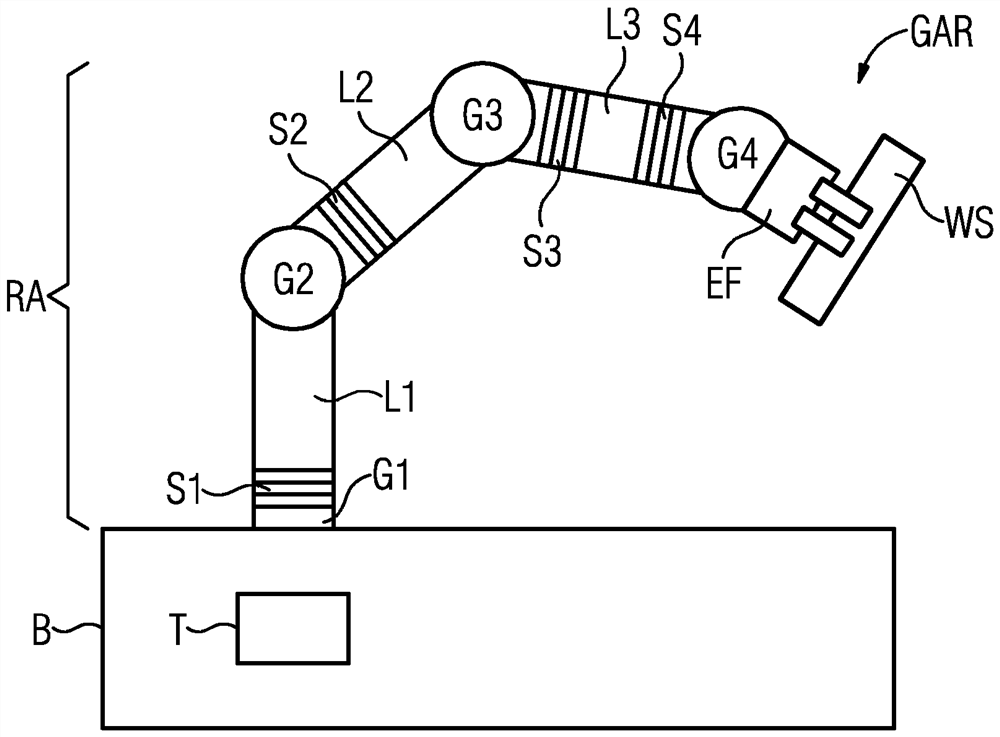
[0024] exist figure 1 , schematically shows an articulated arm robot GAR according to the present invention, such as a manufacturing robot, a medical robot, a service robot, an industrial robot or other robots that interact with users or operators. The articulated arm robot GAR has a robot arm RA mounted on a robot base B.
[0025] The robot arm RA and the robot base B are connected by the joint G1 of the robot arm RA. A joint G1 whose axis of rotation is vertical in the present embodiment connects the arm link L1 of the robot arm RA to the robot base B. Arm link L1 is also connected to arm link L2 via joint G2, which is connected to arm link L3 via joint G3, and which is connected to end effector EF via joint G4. These joints G1, ..., G4 and the arm links L1, ..., L3 as well as the end effector EF are part of the robot arm RA. exist figure 1 In , the end effector EF exemplarily grasps the workpiece WS to be handled by the articulated arm robot GAR. Such joints of a robot...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap