Robot following system and method based on UWB
A robot and base station technology, applied in the field of robots, can solve problems such as large distances and difficulty in all-round tracking, and achieve the effects of simple shape and size judgment, improved stability and accuracy, and simple trajectory prediction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
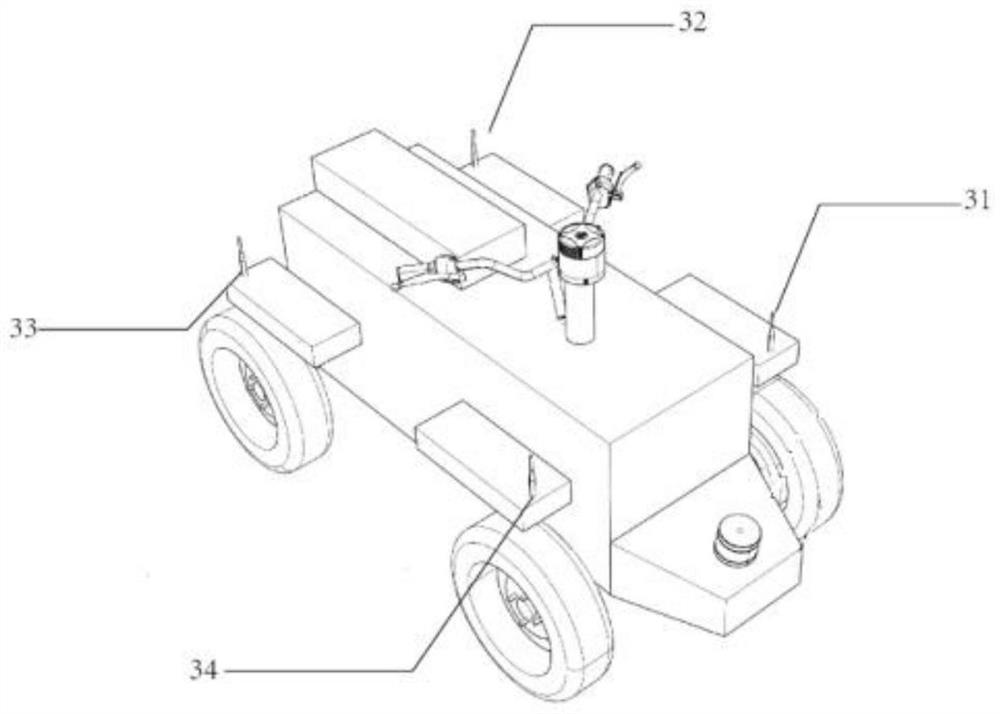
[0044] This embodiment discloses a UWB-based robot following system, such as figure 1 As shown, the following system includes: four UWB base stations (31, 32, 33, 34) set on the robot, a control module, and a UWB tag (set on the following target, not shown in the figure).
[0045] Among them, the four UWB base stations are in one-to-one correspondence with the four wheels of the robot, that is, a UWB base station is set above each wheel. Among the four UWB base stations, UWB base station 31 corresponds to the left front wheel of the robot. The UWB base station 34 corresponds to the right front wheel of the robot. The UWB base station 32 corresponds to the left rear wheel of the robot. The UWB base station 32 corresponds to the right rear wheel of the robot. Moreover, the UWB base station 31 and the UWB base station 33 belong to the same type of base station, and the UWB base station 32 and the UWB base station 34 belong to another type of base station. Based on the Ackerma...
Embodiment 2
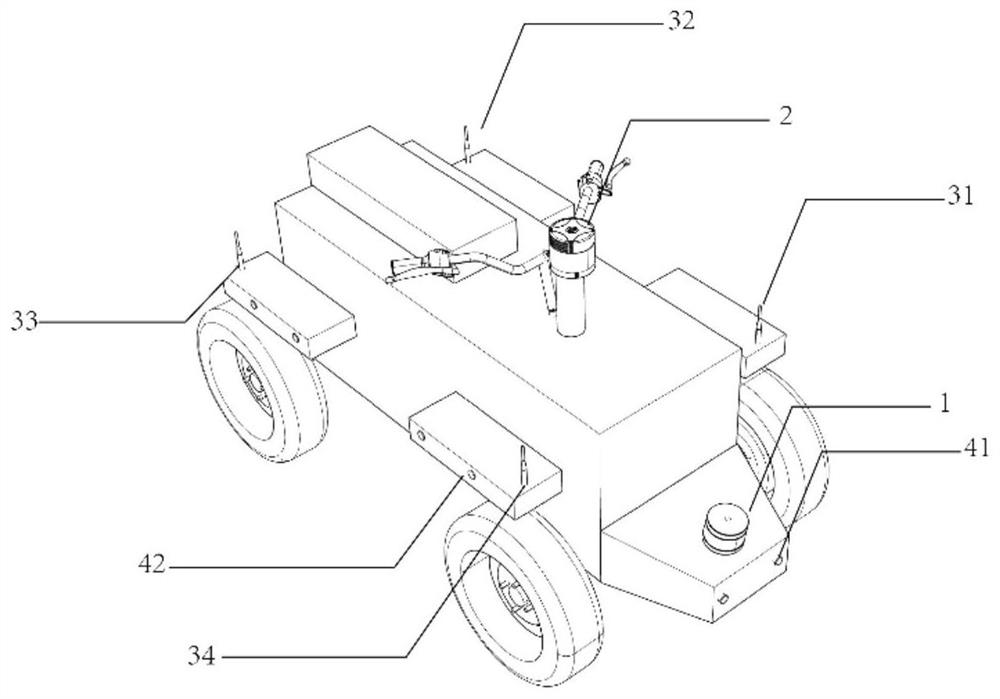
[0051] figure 2 It is a schematic structural diagram of another UWB-based robot following system according to an embodiment of the present invention. In this embodiment, on the basis of the first embodiment above, the following system further includes an obstacle avoidance system, and the obstacle avoidance system includes: an ultrasonic obstacle avoidance system and / or a 3D lidar obstacle avoidance system. The server receives the data of lidar and ultrasonic to judge the obstacle situation around the vehicle, and make timely obstacle avoidance, obstacle crossing and emergency stop processing.
[0052] The ultrasonic obstacle avoidance system consists of multiple ultrasonic sensors around the car body. These ultrasonic sensors are evenly distributed around the car body. Specifically, for example, the ultrasonic obstacle avoidance system consists of 12 ultrasonic sensors around the car body, and the ultrasonic installation positions are as follows: figure 2 Shown in 41 and...
Embodiment 3
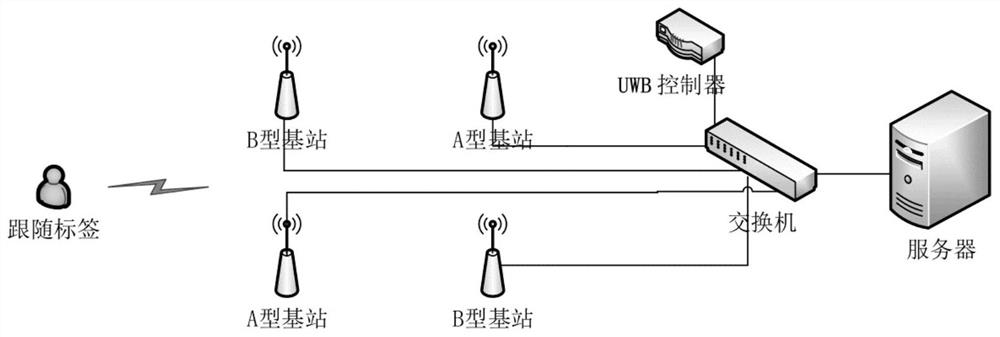
[0056] This embodiment is based on any of the above-mentioned embodiments, such as image 3 As shown, the system includes a mobile platform, UWB following system, ultrasonic obstacle avoidance system and 3D lidar obstacle avoidance system.
[0057] image 3 It is a structural schematic diagram of another UWB-based robot following system according to the embodiment of the present invention. On the basis of the above-mentioned embodiments, the following system includes a control module: a UWB controller and a server. The UWB controller and the server are connected through a switch. The UWB base station, UWB controller and service are connected through a switch to realize data interaction, and the communication protocol used is UDP communication. The server is responsible for receiving UWB positioning information, and controlling the speed of the vehicle through related control algorithms to achieve the goal of intelligent following.
[0058] In this embodiment, the robot (mo...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap