

Yolov3 anchor frame determination method based on improved k-means clustering
A determination method and clustering technology, applied to instruments, character and pattern recognition, computer parts, etc., can solve problems such as unreasonable allocation, and achieve the effect of reducing complexity, reducing the number of samples, and increasing the number of clusters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described in detail below with reference to the accompanying drawings:
[0020] The present invention provides a method based on improving K-Means clustering, the present invention proposes two clustering methods to obtain an anchor frame suitable for different detection scales.
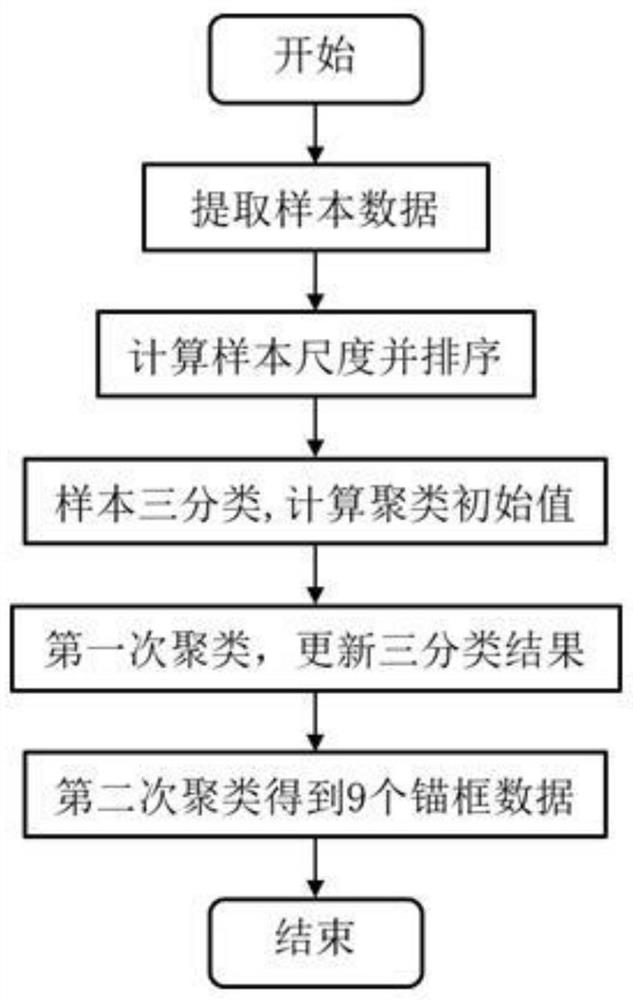
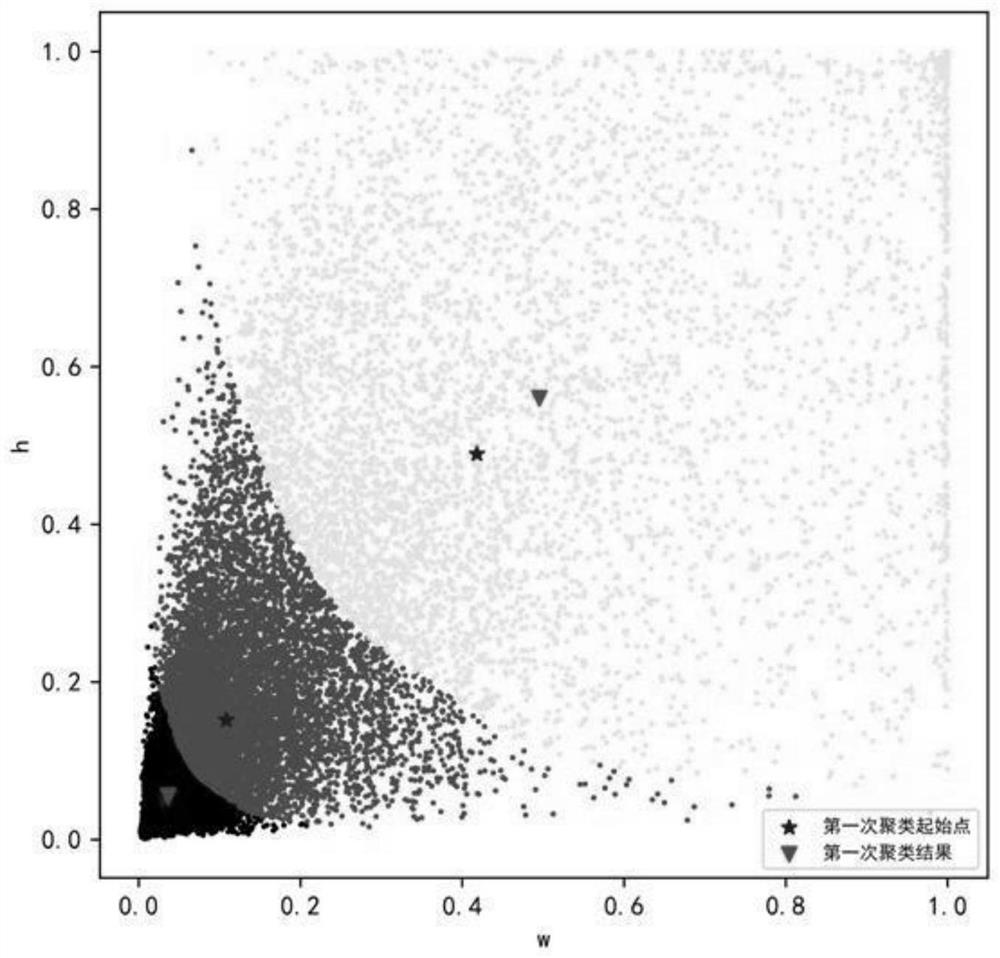
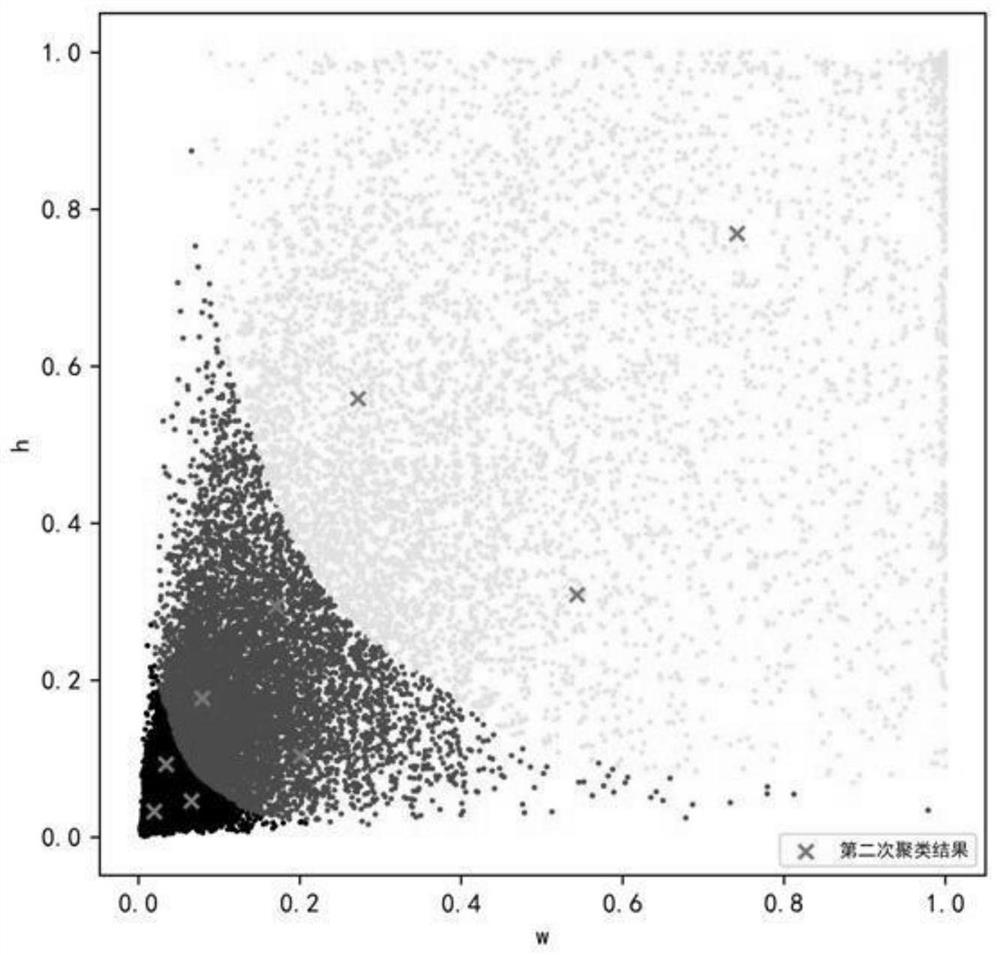
[0021] As a specific embodiment of the present invention, an anchor frame clustering is a flow chart figure 1 As shown, the first cluster results are like figure 2 As shown, the second cluster results are image 3 As shown, the operation time of the two K-Means algorithms proposed by the present invention in different samples in different samples. Figure 4 As shown, the specific steps of the present invention are as follows;
[0022] Step 1: Select 3000 mark files in the COCO data set, including 21,405 annotation information, label format (C * , X * Y * W * H * ), Including the category C * , Center position coordinates of the label box (X * Y * ) And width and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More