

Attitude update method and device based on neural network model
A neural network model and attitude technology, applied in the field of navigation, can solve the problems of large cumulative error, failure to achieve positioning and navigation accuracy, and increase in error, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
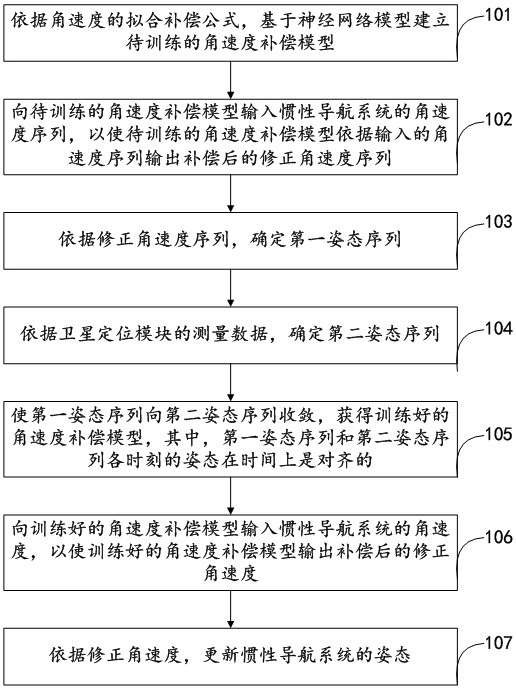
[0050] figure 1It is a schematic flow chart of the attitude update method based on the neural network model shown in the embodiment of the present application.
[0051] see figure 1 , a posture update method based on a neural network model, comprising:
[0052] In step 101, an angular velocity compensation model to be trained is established based on a neural network model according to an angular velocity fitting compensation formula.
[0053] In one embodiment, when the inertial navigation system updates the attitude based on the equivalent rotation vector, the angular increment can be obtained by integrating the angular velocity; through the angular increment, the equivalent rotation vector of the attitude update is obtained; through the equivalent rotation vector update The attitude of the inertial navigation system. In the process of updating the attitude, the angular velocity is compensated according to the fitting compensation formula of the angular velocity. Accordin...
Embodiment 2
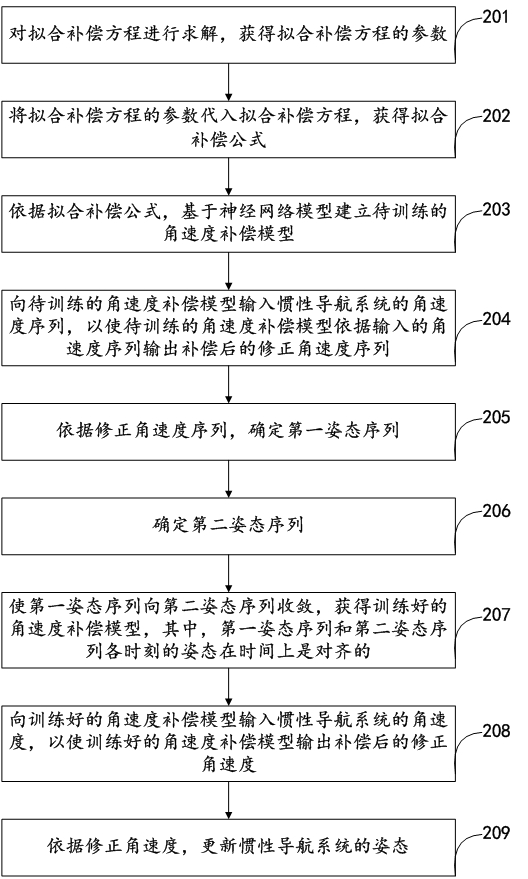
[0069] figure 2 It is another schematic flowchart of the pose update method based on the neural network model shown in the embodiment of the present application. figure 2 compared to figure 1 The protocol of the present application is described in more detail.
[0070] see figure 2 , a posture update method based on a neural network model, comprising:
[0071] In step 201, the fitting compensation equation is solved to obtain parameters of the fitting compensation equation.
[0072] In a specific implementation, when the inertial navigation system updates the attitude based on the equivalent rotation vector, the angular increment can be obtained by integrating the angular velocity ω , the angular increment Include direction and magnitude; pass angle increments , to obtain the equivalent rotation vector ; Update the attitude of the inertial navigation system by the equivalent rotation vector. The equivalent rotation vector means that the attitude from the previou...
Embodiment 3
[0102] Corresponding to the aforementioned embodiment of the application function realization method, the present application also provides a neural network model-based attitude update device, electronic equipment, and corresponding embodiments.
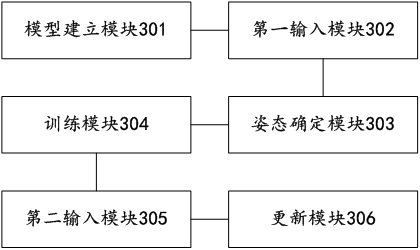
[0103] image 3 It is a schematic structural diagram of the pose update device based on the neural network model shown in the embodiment of the present application.
[0104] see image 3 , a pose update device based on a neural network model, including a model building module 301 , a first input module 302 , a pose determination module 303 , a training module 304 , a second input module 305 , and an update module 306 .
[0105] The model establishing module 301 is used for establishing an angular velocity compensation model to be trained based on the neural network model according to the fitting compensation formula of the angular velocity.
[0106] In one embodiment, when the inertial navigation system updates the attitude based o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More