Unmanned aerial vehicle obstacle avoidance path planning algorithm and path planning algorithm
A technology for unmanned aerial vehicles and path planning, applied in the field of path planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
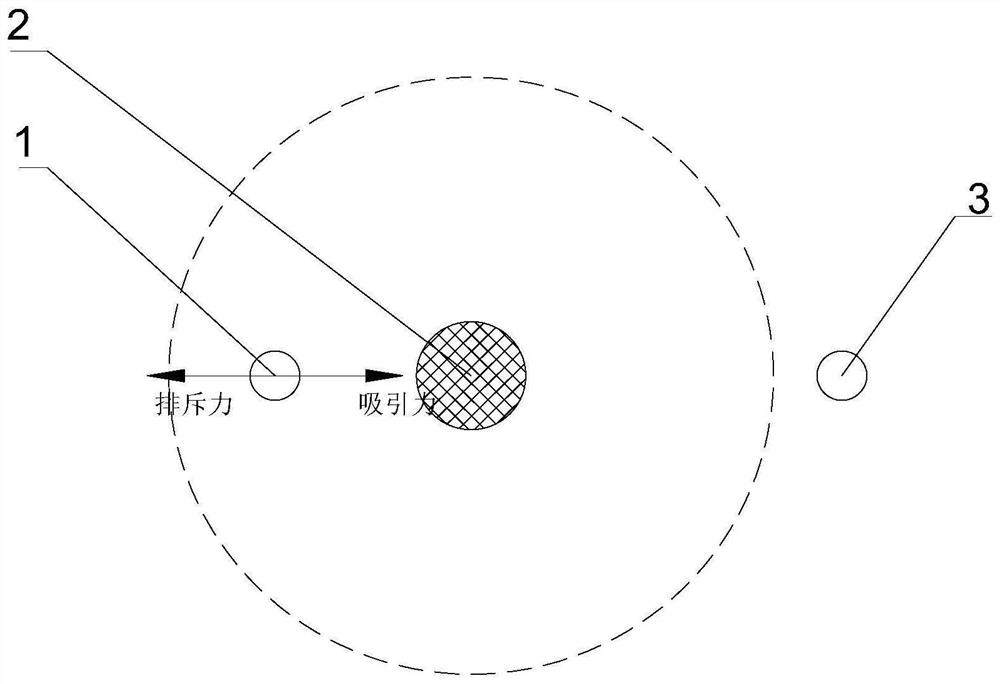
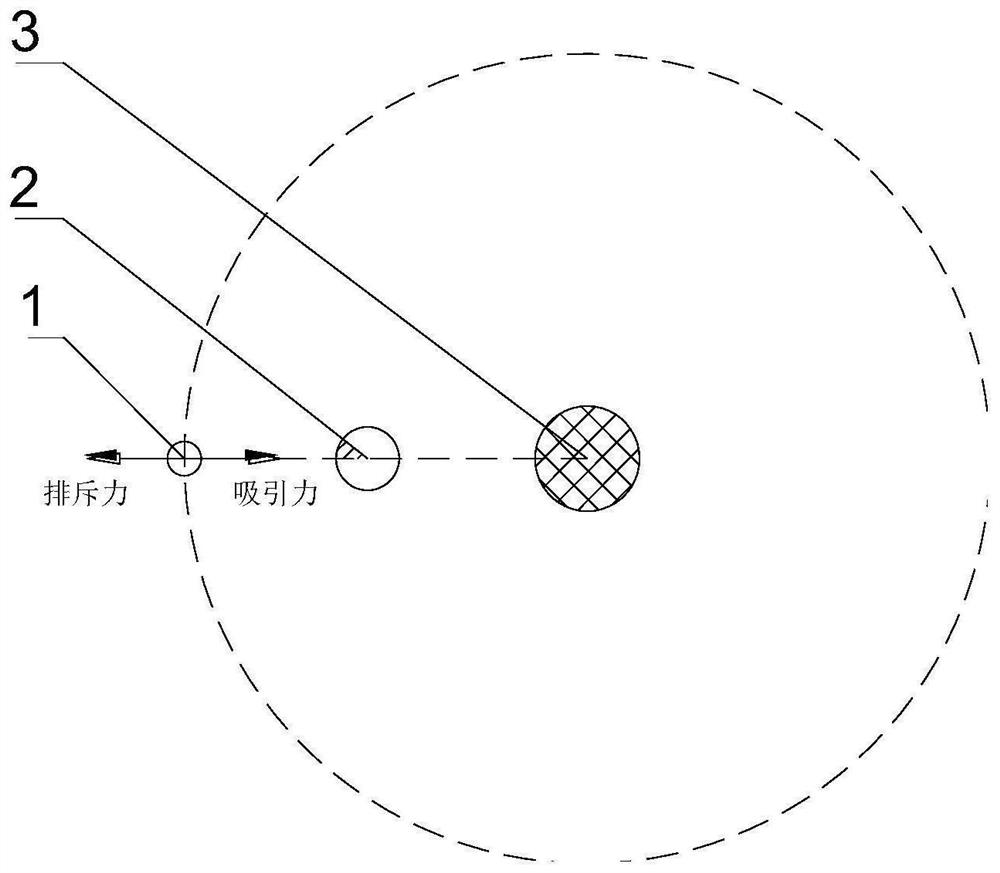
[0049] refer to figure 1As shown, the present disclosure provides an obstacle avoidance path planning algorithm for unmanned aerial vehicles, the method includes, according to the position of the unmanned aerial vehicle, the position of obstacles, and the position of the target, the potential field force of the position of the unmanned aerial vehicle is detected by the artificial potential field method, and it is judged whether is the position of the local minimum value, where the UAV position can be a certain virtual position of the UAV in the route when the UAV route is planned, or it can be the actual position of the UAV when it is actually flying; When the UAV route is planned, the position of the UAV is a virtual position. When the UAV is actually flying, the UAV position is the actual position of the UAV; It can detect whether the UAV is in the local minimum position; the obstacle position can be the obstacle position already known during the UAV route planning, or the o...
Embodiment 2
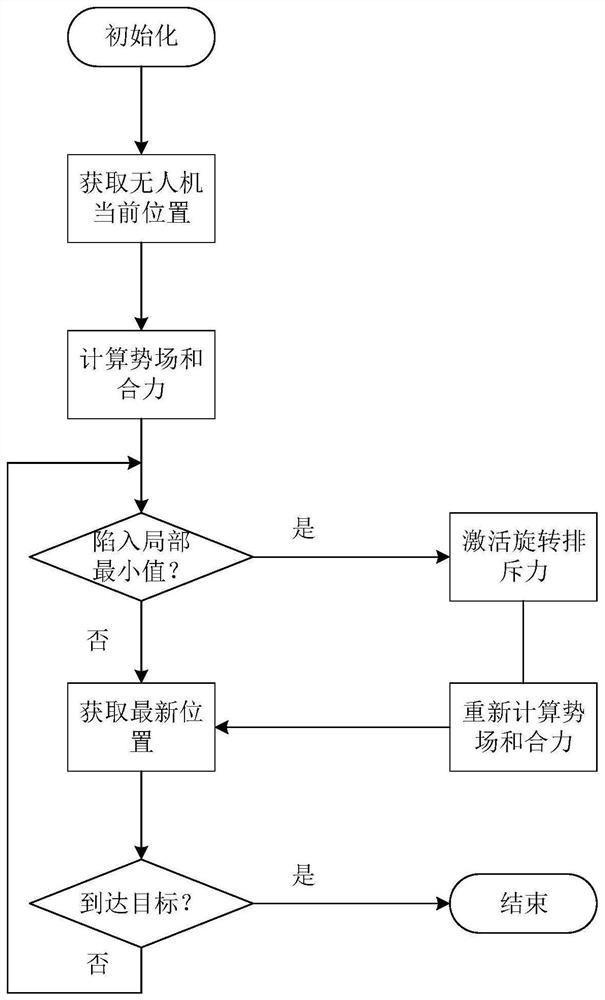
[0074] refer to image 3 As shown, the present disclosure provides an unmanned aerial vehicle path planning algorithm, including:
[0075] Obtain the initial position and target position of the unmanned aerial vehicle. When the path planning of the unmanned aerial vehicle starts, the position of the unmanned aerial vehicle is at the initial position, and the target position can be the position of the end point of the flight of the unmanned aerial vehicle; therefore, when the path planning of the unmanned aerial vehicle is required When planning, the UAV starts planning from the initial position;
[0076] Path planning: Calculate the flight path from the UAV position to the target position through the artificial potential field method. When the UAV obstacle avoidance algorithm detects that the UAV position is a local minimum position, the UAV position in the flight path is applied The obstacle avoidance and escape algorithm of the unmanned aerial vehicle in the first embodimen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More