Unlock instant, AI-driven research and patent intelligence for your innovation.
360-degree video intra-frame prediction mode decision-making method
What is Al technical title?
Al technical title is built by PatSnap Al team. It summarizes the technical point description of the patent document.
A decision-making method and technology of prediction mode, applied in the field of video coding, can solve problems such as time-consuming coding, reduce coding complexity, ensure coding efficiency, and achieve the effect of fast decision-making
Active Publication Date: 2021-11-02
XIAN UNIV OF POSTS & TELECOMM
View PDF5 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
Moreover, the high resolution of 360-degree video will make the mode decision process in intra-frame coding consume a lot of coding time
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
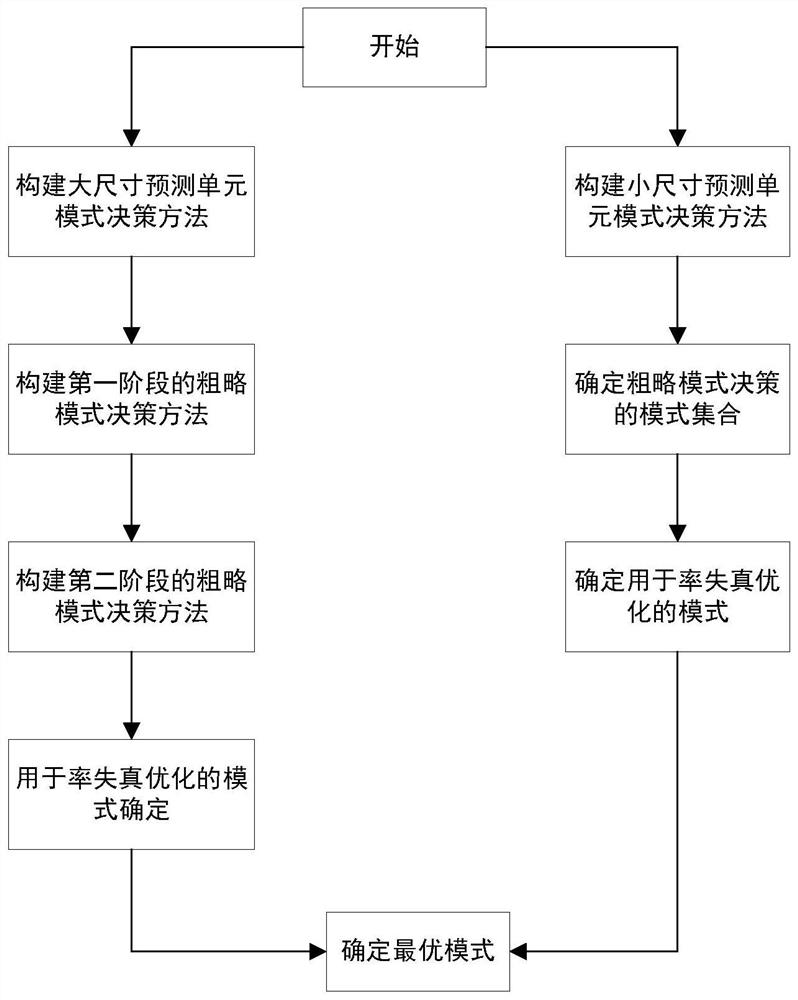
[0063] The 360-degree video intra-frame prediction mode decision-making method of this embodiment consists of the following steps (see figure 1 ):
[0064] (1) Constructing a large-scale prediction unit model decision-making method
[0065] The size of the prediction unit PU is 64×64 and 32×32, and a two-stage rough mode decision method is adopted for the current prediction unit PU:
[0066] 1) Construct the first-stage rough model decision-making method
[0067] Select 8 prediction modes 0, 1, 2, 10, 18, 26, 30, 34 for the rough mode decision in the first stage, and determine the absolute value and SATD of the Hada code transformation of the 8 prediction modes according to the following formula:
[0068]
[0069] Where H is a normalized N×N order Hadamard matrix, N is the size of the matrix, the value of N in this embodiment is 4, X is the prediction residual matrix corresponding to the prediction mode, the size is N, and q represents the value of HXH row, p represents ...
Embodiment 2
[0110] The 360-degree video intra-frame prediction mode decision-making method of the present embodiment consists of the following steps:
[0111] (1) Constructing a large-scale prediction unit model decision-making method
[0112] Select 8 prediction modes 0, 1, 2, 10, 18, 26, 30, 34 for the rough mode decision in the first stage, and determine the absolute value and SATD of the Hada code transformation of the 8 prediction modes according to the following formula:
[0113]
[0114] Where H is a normalized N×N order Hadamard matrix, N is the size of the matrix, the value of N in this embodiment is 8, X is the prediction residual matrix corresponding to the prediction mode, the size is N, and q represents the value of H×H row, p represents the column of HXH.
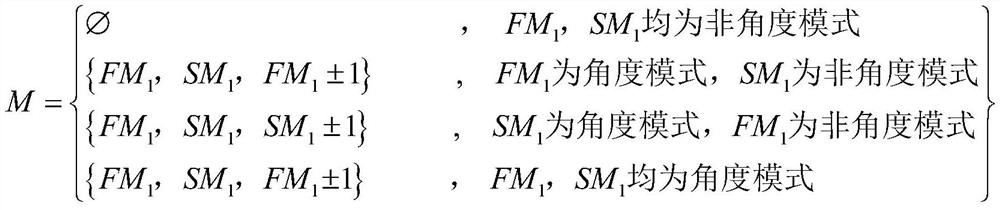
[0115] Select the smallest two modes from the absolute value of Hadamard transform and SATD of the eight prediction modes, which are called the first mode and the second mode FM respectively. 1 , the second mode SM ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention relates to a 360-degree video intra-frame prediction mode decision-making method, which comprises the steps of constructing a large-size prediction unit mode decision-making method and constructing a small-size prediction unit mode decision-making method. The method for constructing the mode decision of the large-size prediction unit comprises the steps of constructing a rough mode decision method of a first stage, constructing a rough mode decision method of a second stage, determining a mode for rate distortion optimization, and determining an optimal mode. The method for constructing the mode decision of the small-size prediction unit comprises a step of determining a mode set of rough mode decision, a step of determining a mode for rate distortion optimization and a step of determining an optimal mode. According to the method, the size of the PU is divided into two sizes, and the PU of different sizes is subjected to mode pre-screening according to the characteristics of the PU, so that the number of modes traversed in the process of rough mode decision and rate distortion optimization (RDO) is effectively reduced, and the rapid decision of the optimal prediction mode of the PU is realized.
Description
technical field [0001] The invention belongs to the technical field of video coding, and in particular relates to the decision-making of a 360-degree video intra-frame prediction mode. Background technique [0002] As a virtual reality technology, 360-degree video has been widely used in immersive cinema, VR games, social media, TV broadcasting and distance education. The resolution of 360-degree video is generally 4K, 6K or 8K, and the frame resolution of the video is usually 60 frames per second, sometimes even as high as 90 frames per second, so high-quality 360-degree video can consume several gigabytes of memory per second. bandwidth. How to effectively increase the encoding speed is a key factor to promote the development of 360-degree video technology. Organizations such as the Joint Photographic Experts Group, the Motion Picture Experts Group, and the Joint Video Research Group are conducting in-depth research on 360-degree video to determine a unified coding stand...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.




 Login to View More
Login to View More  Login to View More
Login to View More