Soft robot modeling method
A modeling method and robot technology, which is applied in instruments, special data processing applications, electrical digital data processing, etc., can solve problems such as large deformation, nonlinearity, and material nonlinearity of soft robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
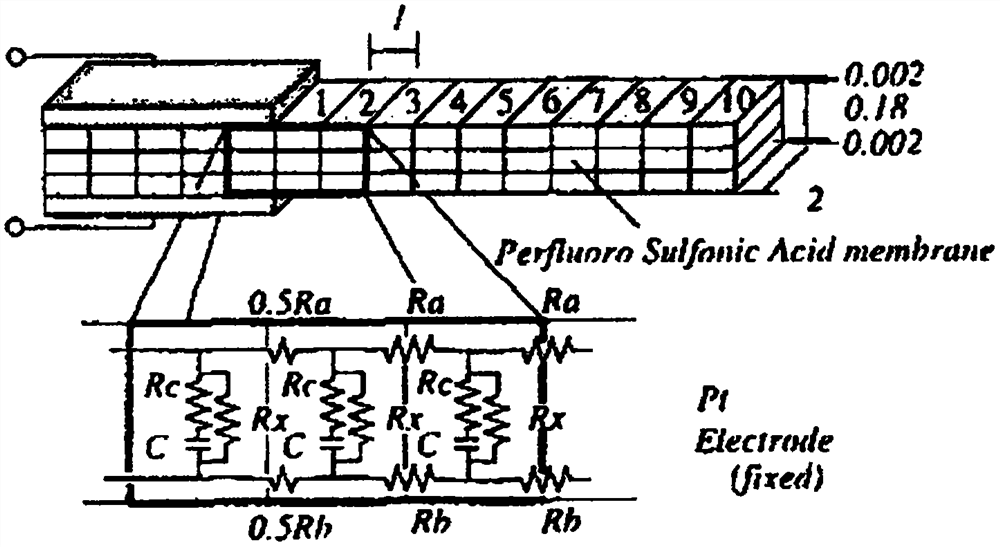
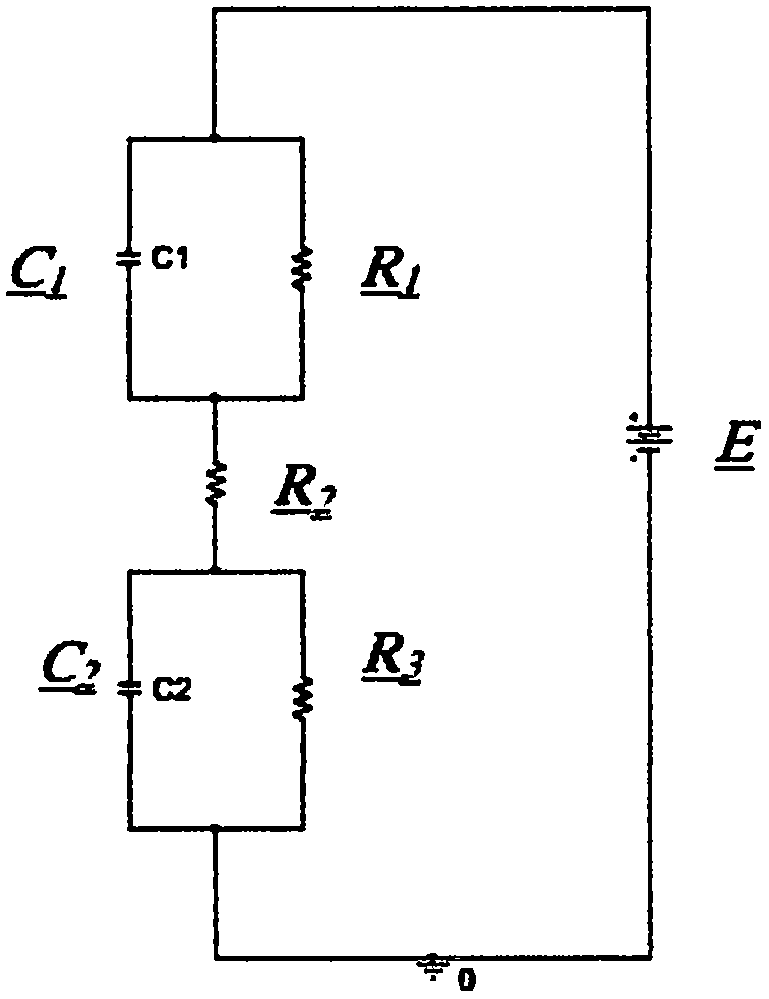
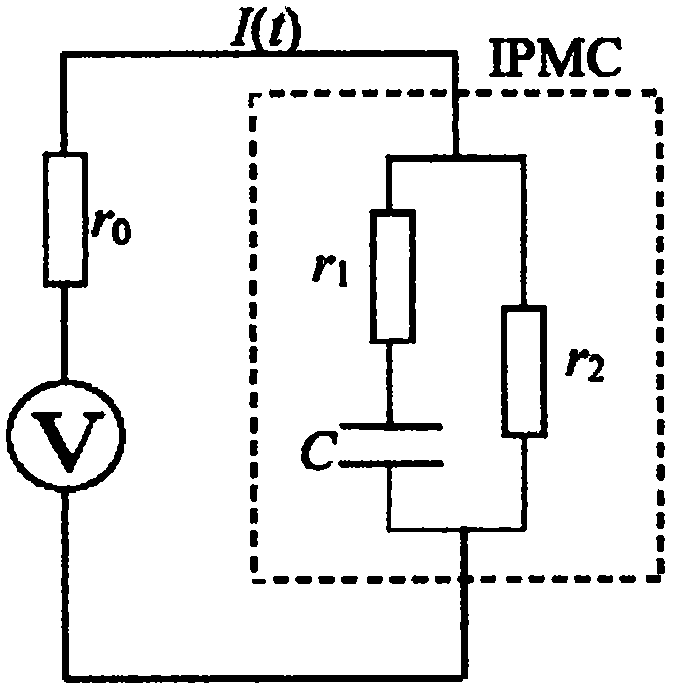
[0011] Implement a kind of software robot modeling method of the present invention, comprise white box model, black box model and gray box model, white box model starts from the internal mechanism of the material, utilizes multidisciplinary knowledge such as physics, chemistry, mechanics and electricity to establish partial Differential equations are used to describe the basic characteristics of the ionic EAP driver. Each parameter in the model has a clear physical meaning. The black box model refers to the use of The experimental identification technology directly establishes the model, and it is easy to obtain the analytical solution of the model and the system transfer function. The gray box model combines the basic physical laws and experimental test data, and uses the parameter identification technology to obtain a model that can reflect the internal laws of some systems.
[0012] Implement a kind of soft robot modeling method of the present invention, white box model has ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com