

Exoskeleton auxiliary rehabilitation training robot and working method thereof
A rehabilitation training and robotics technology, which can be applied to training equipment for adjusting coordination, training equipment for adjusting cardiovascular system, auxiliary products for massage, etc. It is easy to adjust, improve rehabilitation training, and improve the use height of problems such as laborious use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
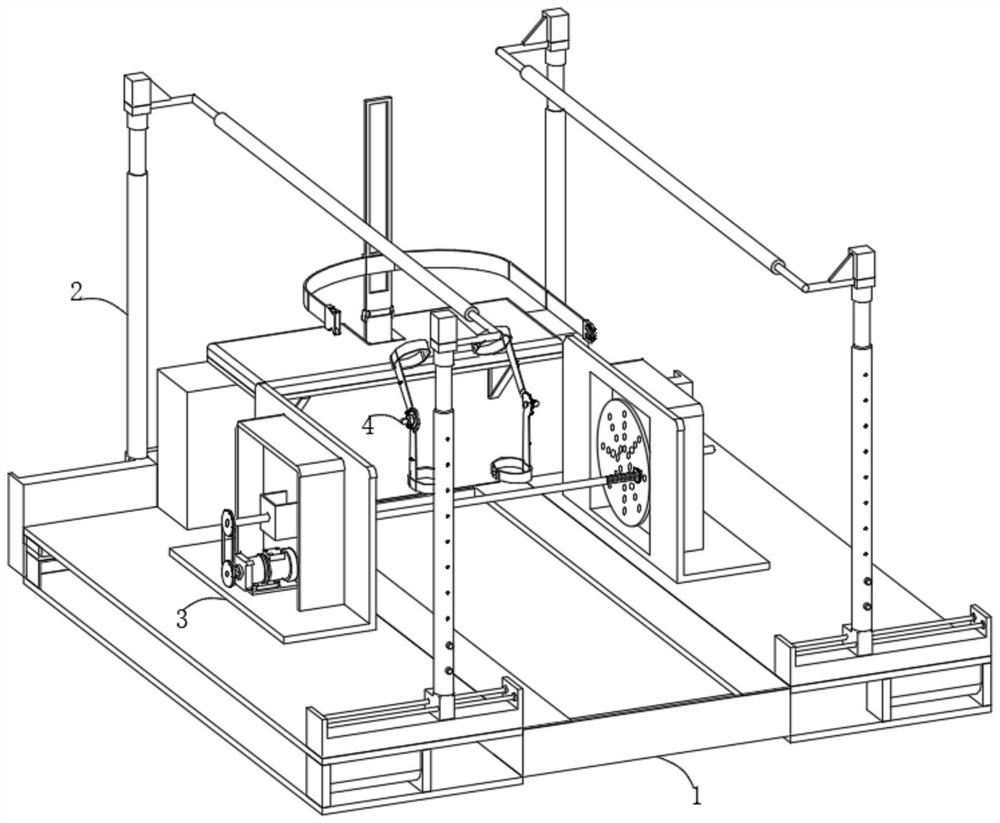
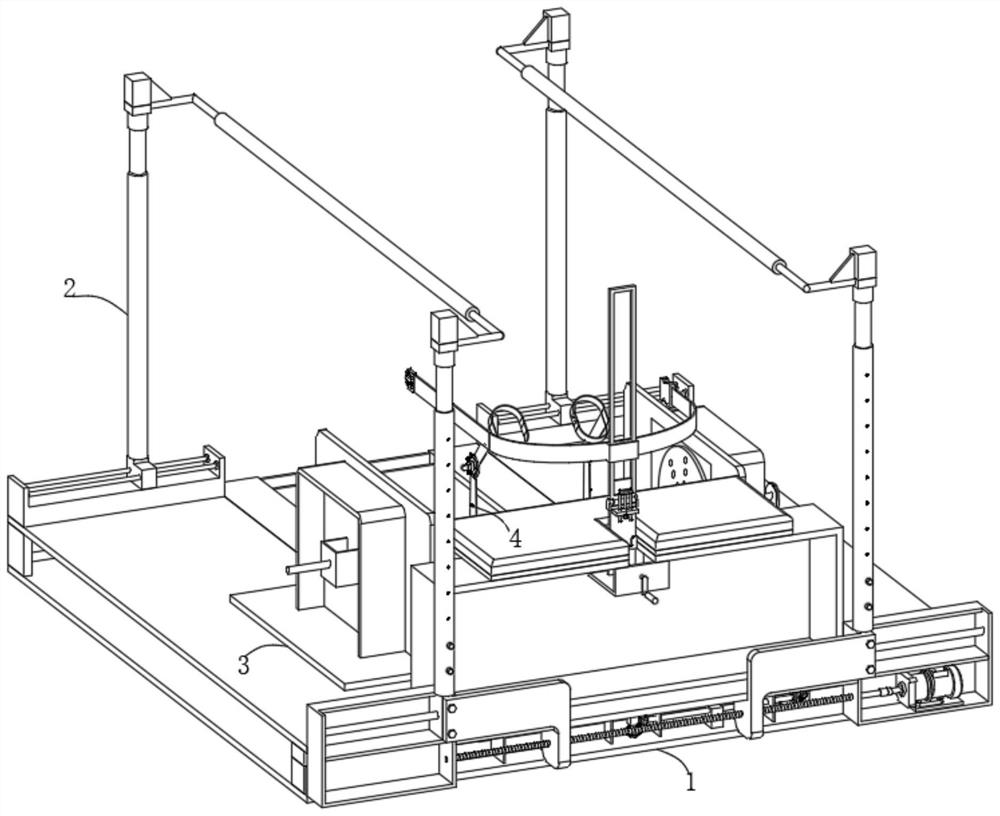
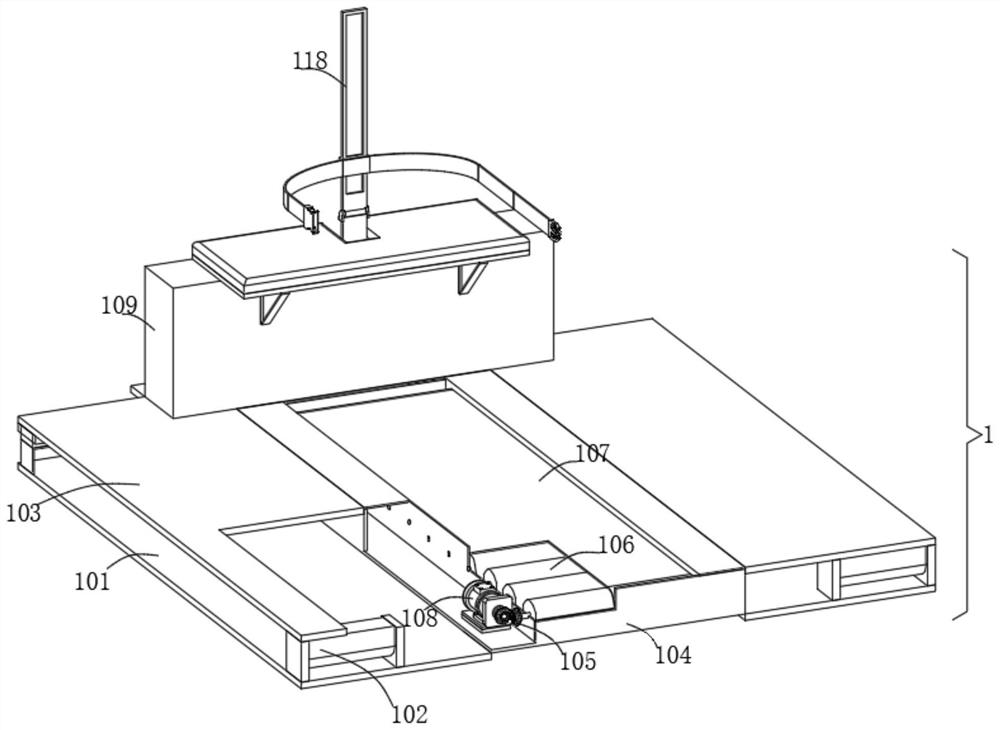
[0040] refer to Figure 1-Figure 12 : An exoskeleton-assisted rehabilitation training robot, comprising: an adjustment mechanism 1, a support mechanism 2, a functional mechanism 3 and a protection mechanism 4, the adjustment mechanism 1 includes a base plate 101, moving parts and adjustment parts, and the base plate 101 is set up as other functional parts of the equipment The setting provides the installation foundation. A set of support blocks are fixedly connected to the top of the bottom plate 101 close to the two corners. The support blocks are set up to facilitate the installation and setting of the connection block 102. There are two support blocks in each group, two in each group. A connection block 102 is rotationally connected between the relative outer surfaces of the support blocks. The connection block 102 is set up to facilitate the installation of the top plate 103. A top plate 103 is fixedly connected between the tops of the two connection blocks 102. The top pla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More