

Picking robot control method and system based on visual identification
A picking robot and visual recognition technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of reduced picking efficiency, different types of fruits and vegetables, and different distribution positions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0147] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
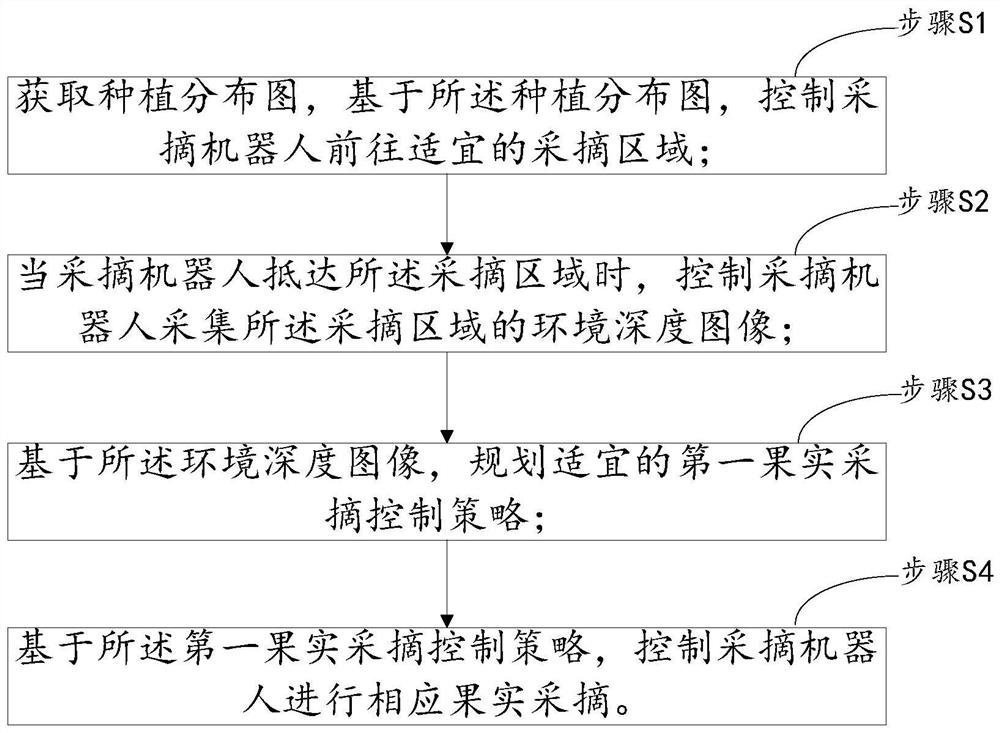
[0148] An embodiment of the present invention provides a visual recognition-based picking robot control method, such as figure 1 shown, including:
[0149] Step S1: Obtain the planting distribution map, and control the picking robot to a suitable picking area based on the planting distribution map;
[0150] Step S2: When the picking robot arrives at the picking area, control the picking robot to collect the environmental depth image of the picking area;
[0151] Step S3: planning an appropriate first fruit picking control strategy based on the environmental depth image;
[0152] Step S4: Based on the first fruit picking control strategy, control the picking robot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More