Method, system and device for controlling piano playing action based on humanoid arm claw robot
A technology of motion control and robotics, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of not being able to fully utilize the performance of arms and grippers, different playing performance of grippers, and poor synchronization of arm and gripper movements, etc., to achieve good results. Piano performance effect, convenient content modification, and synchronous coordination effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0083] In this embodiment, Ode to Joy is used as the implementation track to describe the implementation process of a method for generating and executing piano-playing movements based on a humanoid arm and claw robot.
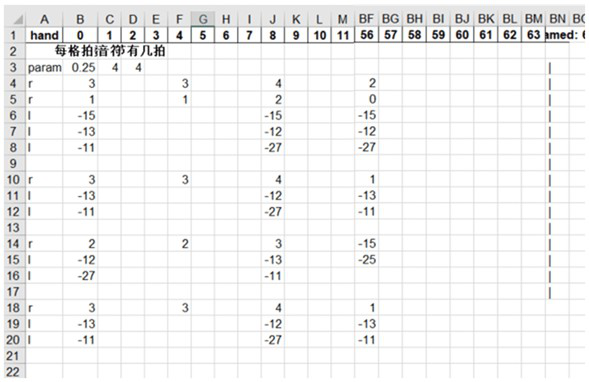
[0084] Step S1, enter the score into the excel form according to the rules, such as figure 2 shown. figure 2 Enter the schematic diagram for the excerpted score, and then analyze the score.
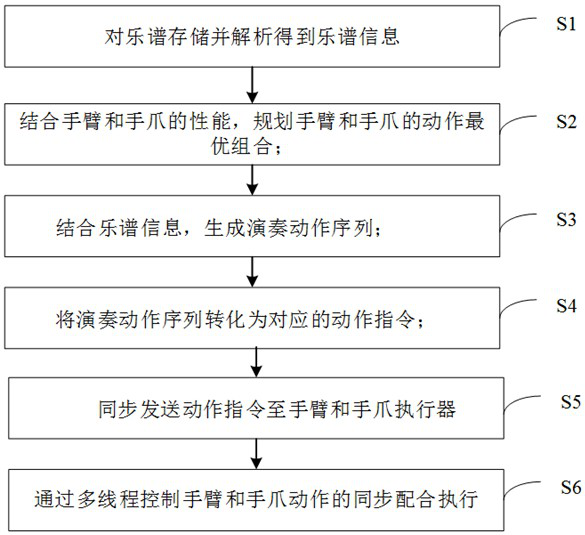
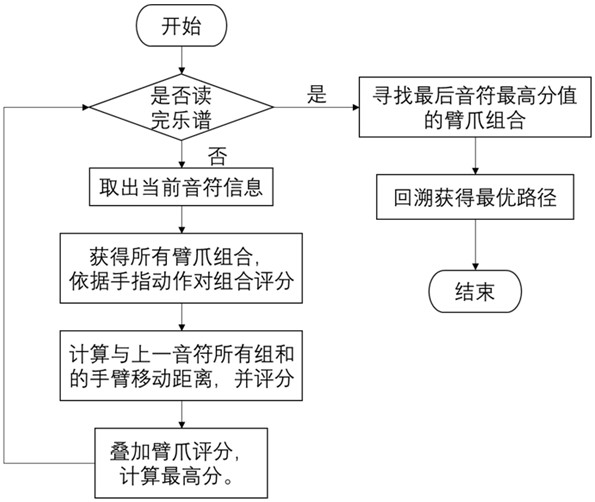
[0085] Step S2, according to the score information obtained by analyzing step S1, combined with the specific performance of the arm and the claw, and according to the order of playing the notes, the movement combination of the arm and the claw is obtained. The overall planning process is as image 3 shown.
[0086] Step S2.1, score according to the actual performance of the arm and fingers respectively. The performance score of the finger is shown in Table 1, and the score of the arm is shown in Table 2. The worse it is, the lower its rating.
[0087] Table 1: Scori...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com