

Composite AGV robot scheduling method and system
A technology for robotics and scheduling schemes, used in control/regulation systems, general control systems, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
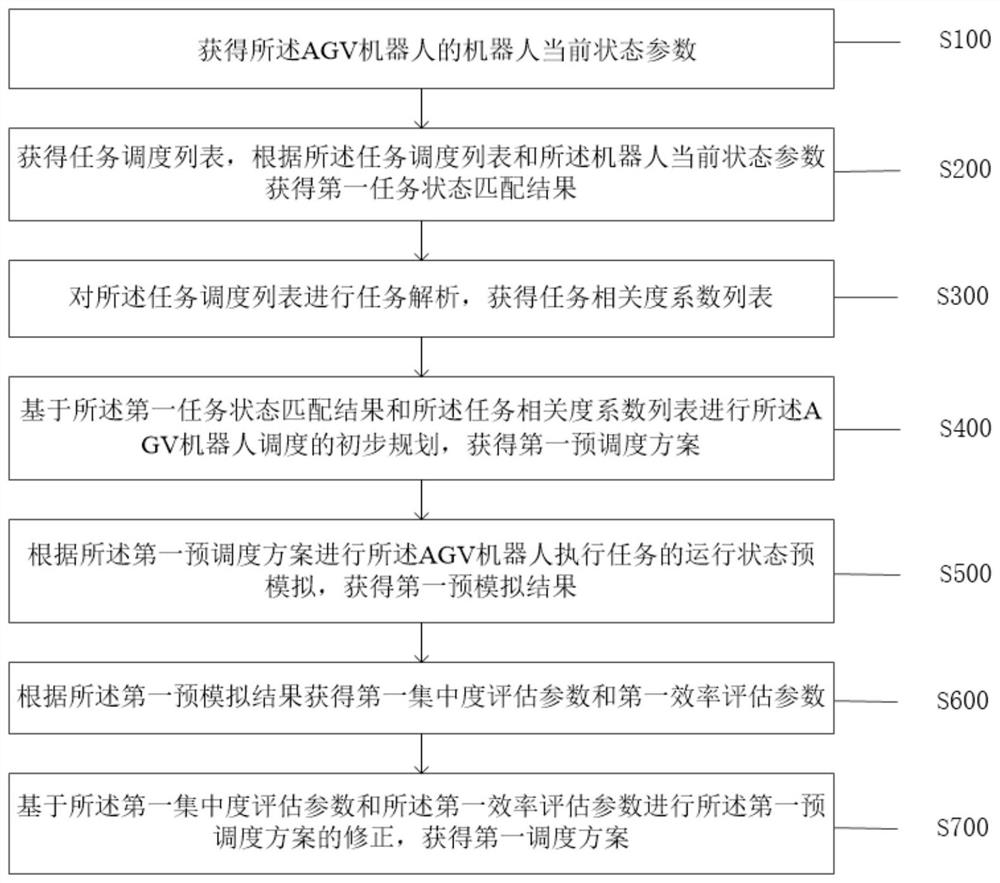
[0029] like figure 1 As shown, the present application provides a compound AGV robot scheduling method, the method is applied to an intelligent dispatching control system, the intelligent dispatching control system is connected to the AGV robot in communication, and the method includes:
[0030] Step S100: obtaining the robot current state parameters of the AGV robot;
[0031] Step S200: obtaining a task scheduling list, and obtaining a first task state matching result according to the task scheduling list and the robot current state parameter;
[0032] Specifically, the intelligent dispatching control system is a system that performs intelligent dispatching and control of AGV trolleys. The intelligent dispatching control system is connected to the task management center, the status monitoring center, and a plurality of AGV robots, and can carry out mutual data interaction. The intelligent dispatching control system can perform dispatching control of multiple AGV robots. Ther...
Embodiment 2
[0088]Based on the same inventive concept as a compound AGV robot scheduling method in the foregoing embodiment, the present invention also provides a compound AGV robot scheduling system, such as Figure 5 As shown, the system includes:
[0089] The first obtaining unit 11, the first obtaining unit 11 is used to obtain the current state parameters of the robot of the AGV robot;
[0090] a second obtaining unit 12, the second obtaining unit 12 is configured to obtain a task scheduling list, and obtain a first task state matching result according to the task scheduling list and the current state parameter of the robot;
[0091] A third obtaining unit 13, the third obtaining unit 13 is configured to perform task analysis on the task scheduling list to obtain a list of task correlation coefficients;
[0092] a fourth obtaining unit 14, the fourth obtaining unit 14 is configured to perform preliminary planning of the AGV robot scheduling based on the first task state matching res...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More