

Application compliance auxiliary control method for variable stiffness exoskeleton
An auxiliary control and exoskeleton technology, applied in the field of robots, to achieve the effects of easy implementation, improved adaptability, and reduced costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
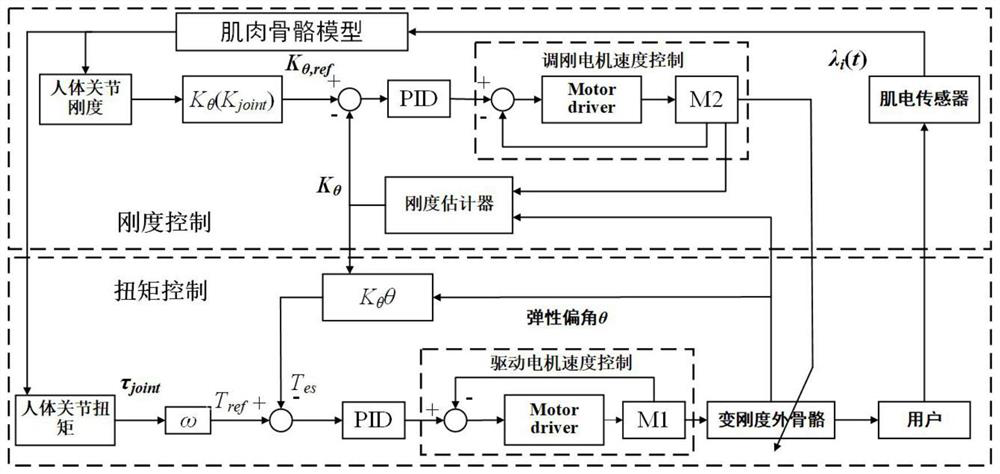
[0063] The method steps are described in detail below in conjunction with the flow chart: Figure 4 As shown, a voluntary compliance-assisted control method for a variable stiffness exoskeleton, taking the knee joint as an example, includes the following steps:
[0064] Step S1, acquiring and executing a preset control program;
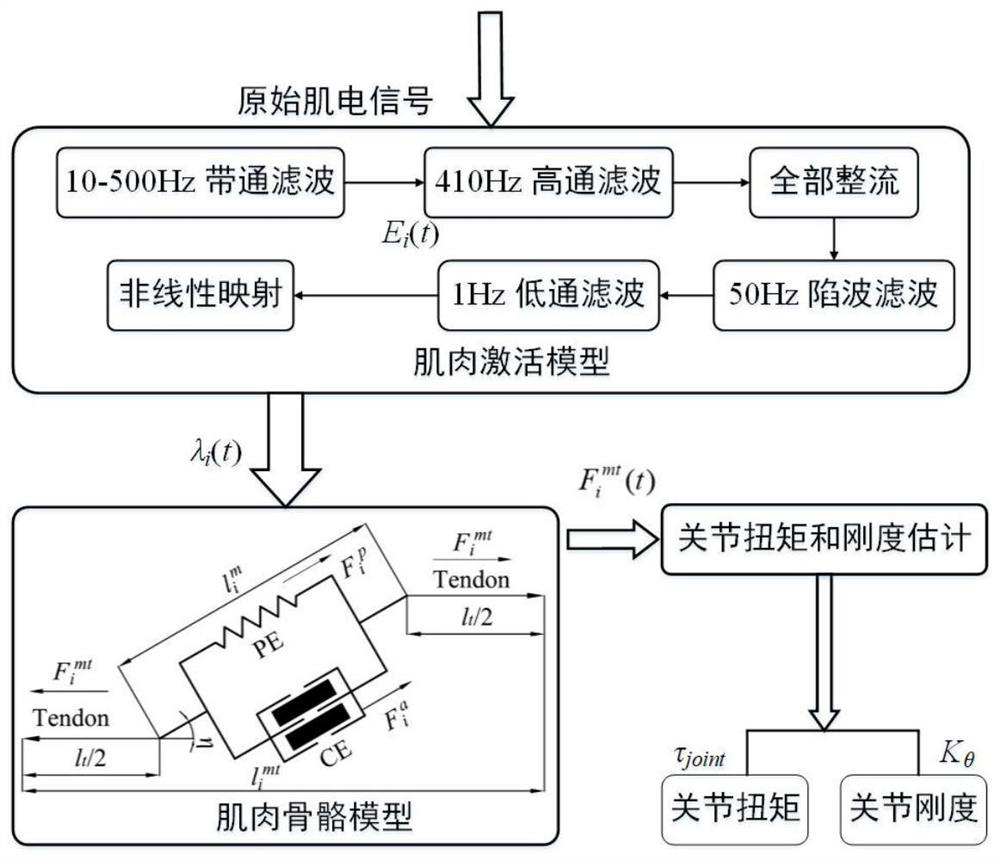
[0065] In step S2, the surface EMG signals of the user's vastus medialis, vastus lateralis, semimembrano...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More