

Fault-tolerant control method for tiny faults of control surface of hypersonic flight vehicle with random attitude
A hypersonic, fault-tolerant control technology, applied in the field of flight control, can solve the problems of difficulty in evaluating the effect of fault-tolerant control, poor accuracy and reliability, and occupying a lot of software and hardware resources, so as to meet high reliability requirements, reduce repair costs, and eliminate The effect of software and hardware resource occupancy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
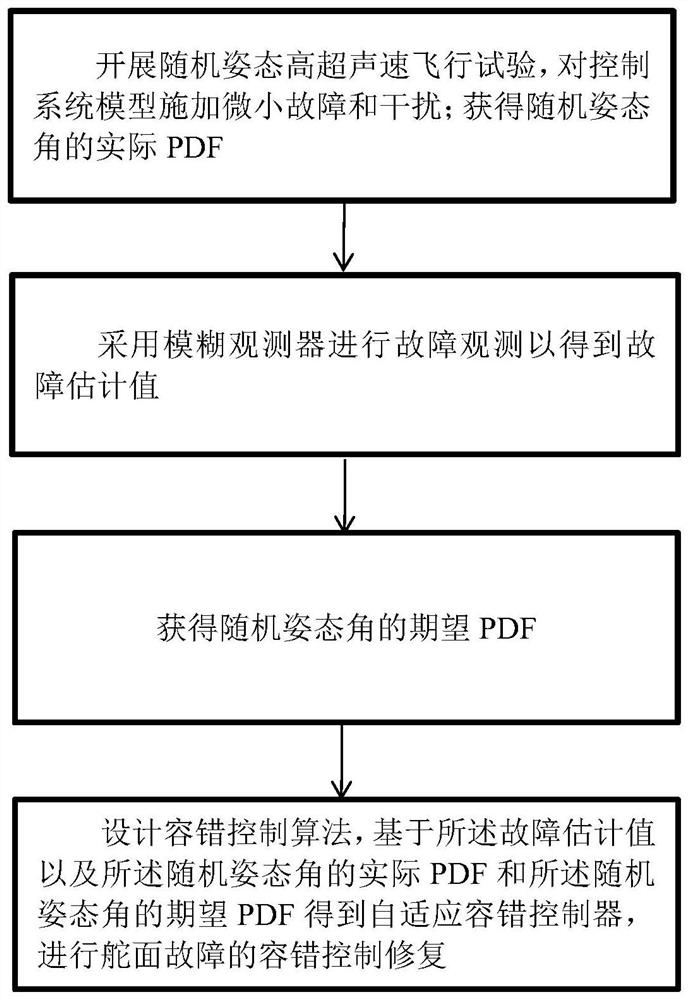
[0085] A specific embodiment of the present invention discloses a fault-tolerant control method for small rudder surface faults of a random attitude hypersonic aircraft, comprising the following steps:
[0086] S1. Carry out a random attitude hypersonic flight test, impose minor faults and disturbances on the control system model; obtain the actual PDF (Probability Density Function) of the random attitude angle;
[0087] Among them, the control system model is a non-Gaussian random distribution model introduced on the basis of the traditional hypersonic vehicle re-entry segment model, and then a random attitude hypersonic vehicle re-entry segment rudder surface-angular rate- Attitude angle control system model;
[0088] S2. Use the fuzzy observer to observe the fault to obtain the estimated fault value;
[0089] S3. Obtain the expected PDF of the random attitude angle;
[0090] S4. Design a fault-tolerant control algorithm, obtain an adaptive fault-tolerant controller based ...
Embodiment 2
[0093] Optimizing on the basis of Embodiment 1, step S1 can be further refined into the following steps:
[0094]S11. Specifically, the control system model is a non-Gaussian random distribution model introduced on the basis of the traditional hypersonic aircraft re-entry segment model, and then a random attitude hypersonic aircraft re-entry segment rudder with external faults and external disturbances is formed. The face-angular rate-attitude angle control system model, hereinafter referred to as the control system model, the nonlinear stochastic state equation of the control system model is:
[0095]
[0096]
[0097] V(t)=D(Ξx(t))
[0098] γ(ρ,u(t))=Φ 2 (C(ρ)V(t)) 2
[0099] Where t represents time, and t=0 represents the response start time; and and are the angular rate of the angle of attack, the angular rate of the roll angle and the angular rate of the sideslip angle; ρ=[ρ 1 ρ 2 ρ 3 ] T and ρ 1 , ρ 2 and ρ 3 are the angle of attack, roll angle an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More