

Fine grabbing-oriented dexterous hand adaptive admittance control system and method
A control method and technology for a control system, which are applied in the field of dexterous hand adaptive admittance control systems for fine grasping, can solve problems such as self-adaptation and force overshoot, and achieve the effect of solving self-adaptation and force overshoot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
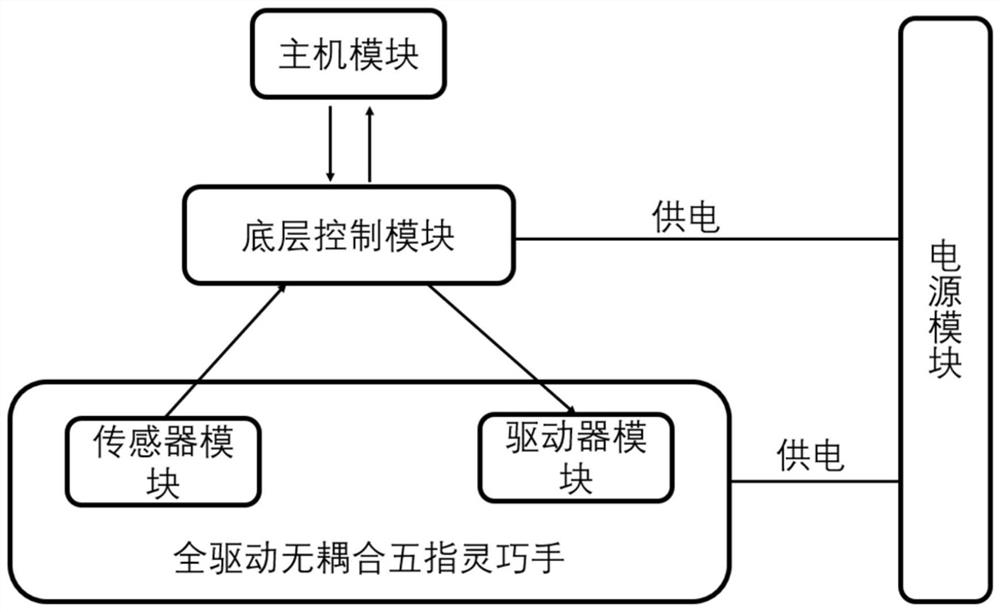
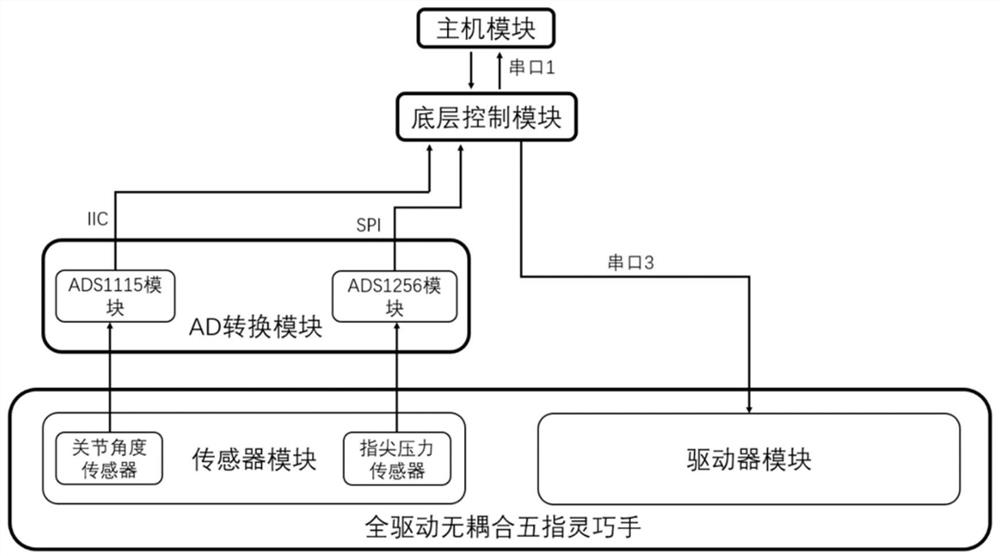
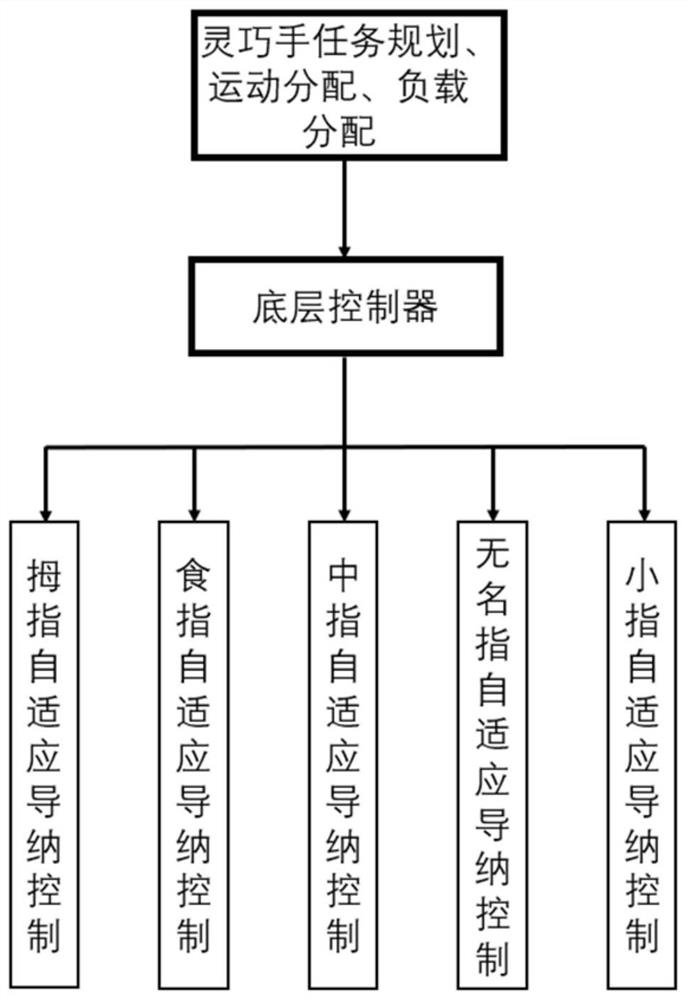
[0048] In order to make the technical problems, technical solutions and beneficial effects to be solved by the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention. The present invention is an adaptive admittance control system for a dexterous hand based on fine grasping. The control system is mainly composed of a fully-driven uncoupling five-finger dexterous hand driven by tendons, a power supply module, a driver module, a sensor module, and a multiplexing module. , AD conversion module, bottom control module, host module. The fully-driven uncoupling five-finger dexterous hand driven by tendons is composed of five independent fingers, each finger includes a side swing joint and three bending joints with a total of four degr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More