

Multi-adaptive steel wire rope flaw detection robot and use method thereof
A flaw detection, robot technology, applied in elevators, transportation and packaging, etc., can solve the problems of eccentric wear of the drive mechanism and affect the service life of the robot, and achieve the effect of suppressing deflection and facilitating installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The specific embodiments of the present invention are further described below with reference to the accompanying drawings.
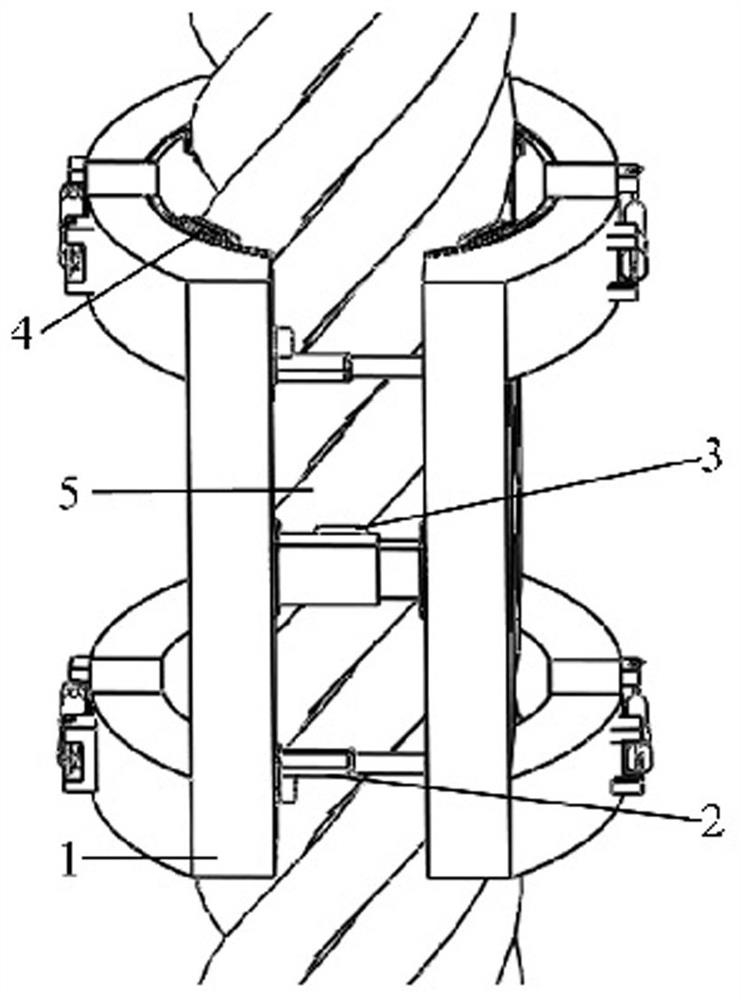
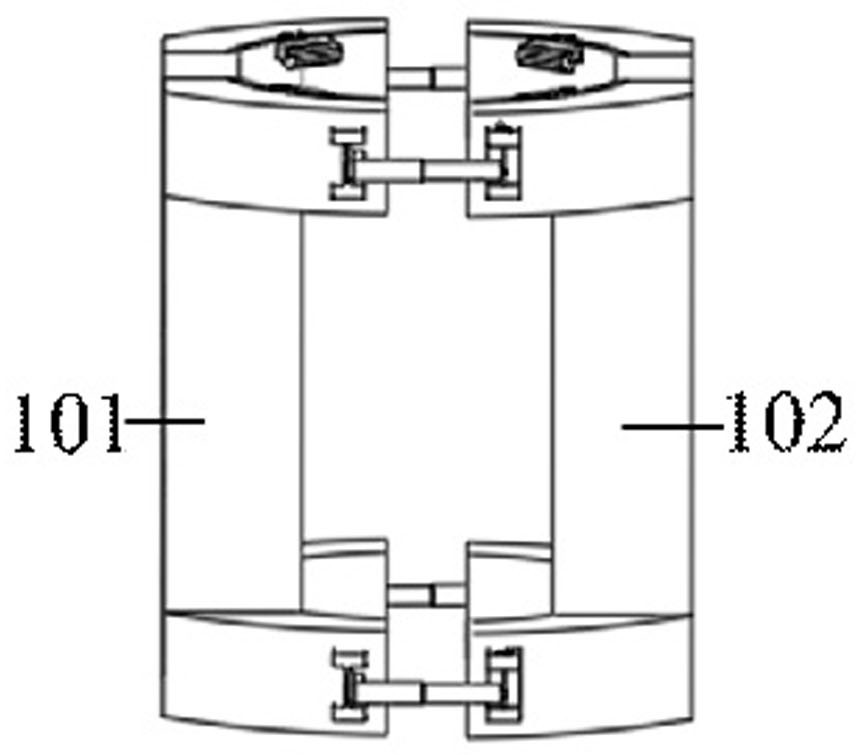
[0029] like Figure 1-5 As shown, the multi-adaptive wire rope flaw detection robot of the present invention is characterized in that it comprises an outer frame device 1 composed of an outer frame I101 and an outer frame II102, and a tensioning device 2 connecting the outer frame I101 and the outer frame II102, respectively provided The two main drive devices 3 on the inner side of the middle of the outer frame I101 and the outer frame II102, and the sets of driven devices 4 on the inner sides of the two ends of the outer frame I101 and the outer frame II102, respectively,
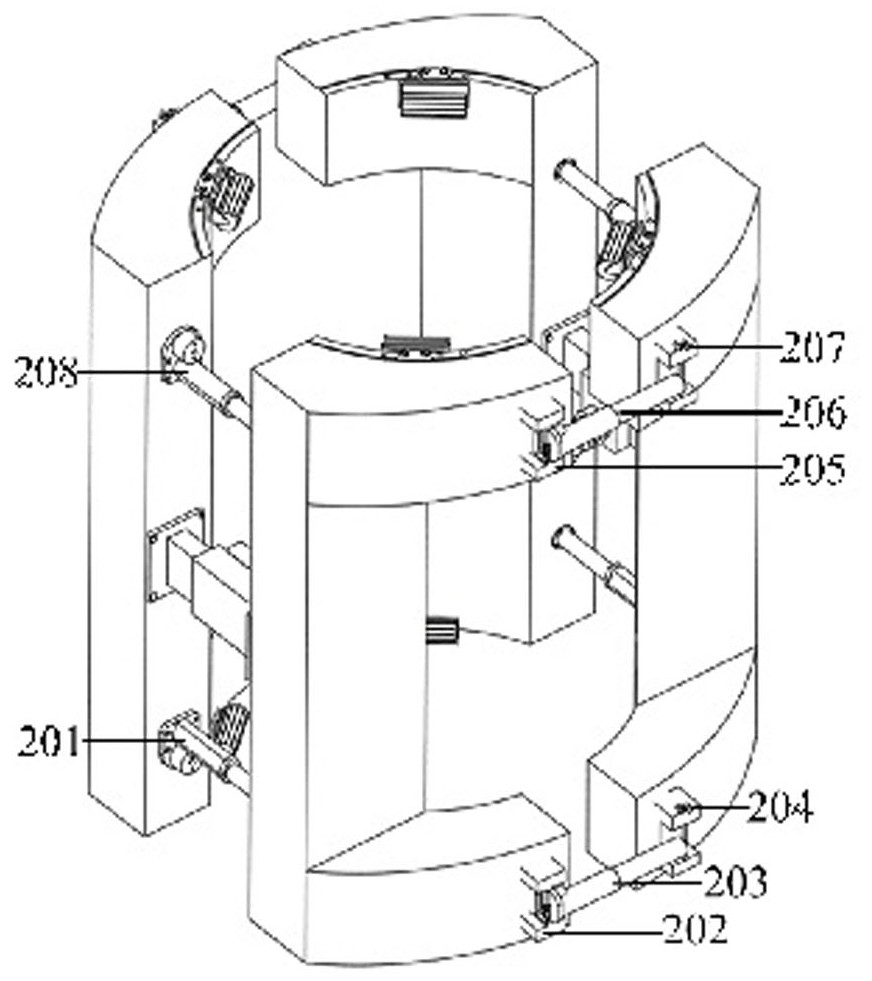
[0030] The main driving device 3 includes a support column 304 arranged in the middle of the two frames of the outer frame I101 or the outer frame II 102, a drive wheel support frame 303 arranged on this support column 304, and a drive wheel support frame 303 arranged on this...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More