

Robot device and behavoir control method for robot device
A robot and behavioral technology, applied in the direction of program control, general control system, program control manipulator, etc., can solve problems such as lack of certainty and inability to recognize objects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings. This embodiment is intended to illustrate an autonomous robotic device that behaves autonomously in response to the surrounding environment (external stimuli) and internal state.
[0054] In this embodiment, first, the structure of the robot device will be described, and then the daily functions achieved by the robot will be described in detail.
[0055] (1) The structure of the robot device of this embodiment
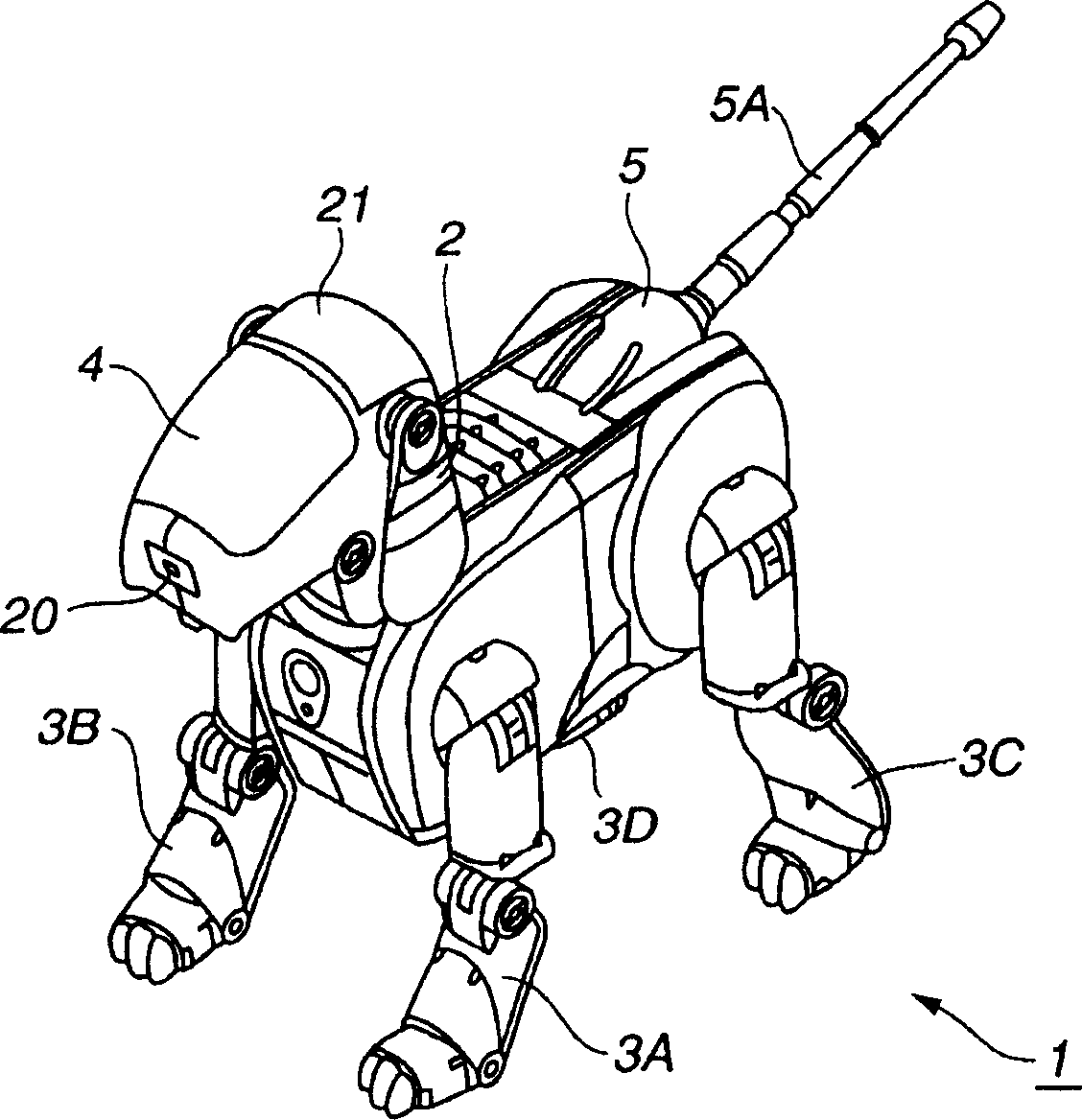
[0056] As shown in FIG. 1, the robot device is a so-called pet robot imitating an animal such as a dog, and consists of leg units 3A, 3B, 3C and 3D respectively connected to the front and rear sides of the left and right sides of the trunk unit 2 and connected to the trunk unit 2 respectively. The head unit 4 and the tail unit 5 at the front and rear ends of the unit 2 are constituted.
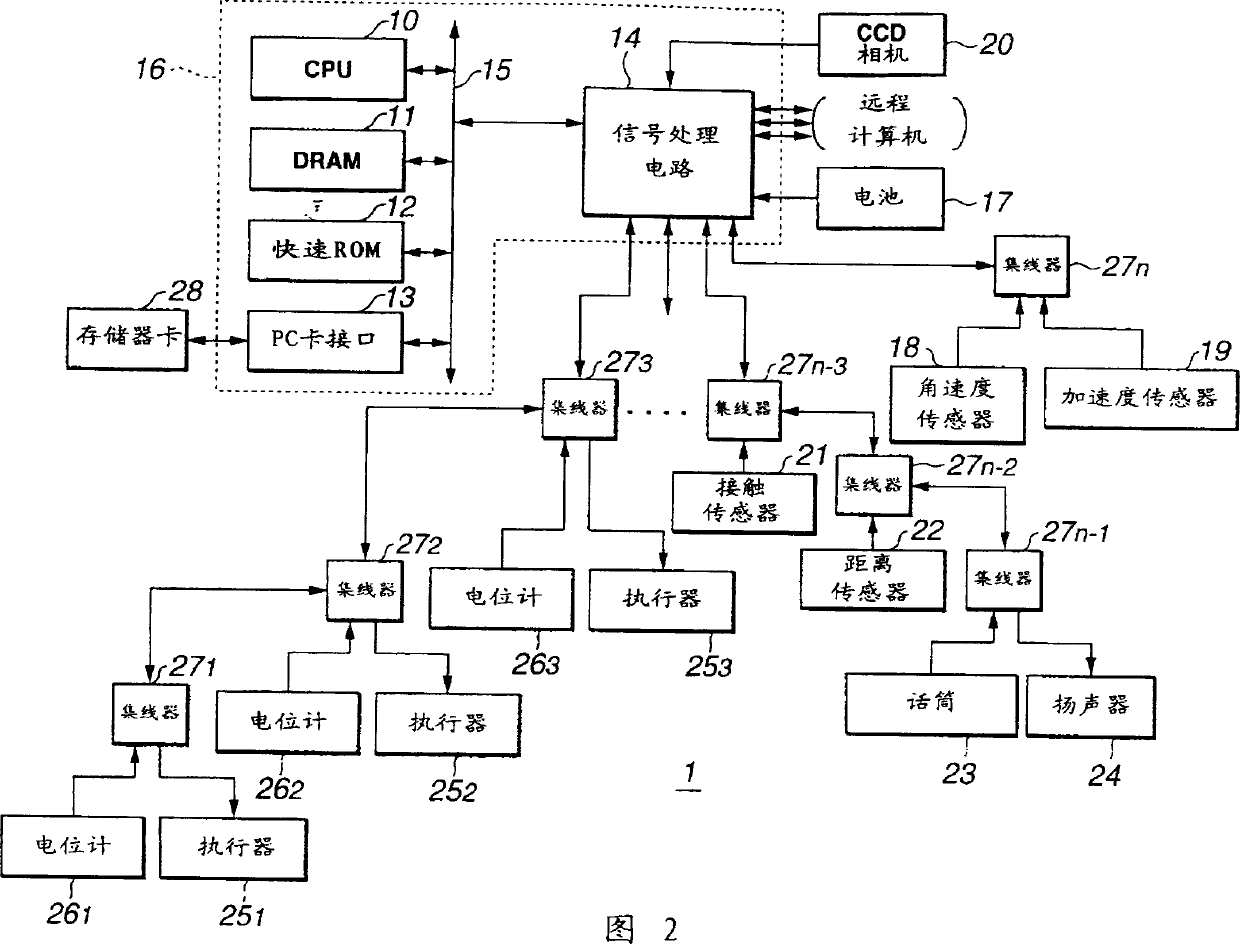
[0057] Referring to Fig. 2, trunk unit 2 comprise...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More