

Windows form application behavior simulation robot and working method thereof
A technology for simulating robots and application programs, applied in the field of robotics, can solve the problems of cumbersome operation, low scalability, and no involvement, etc., and achieve the effect of wide application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
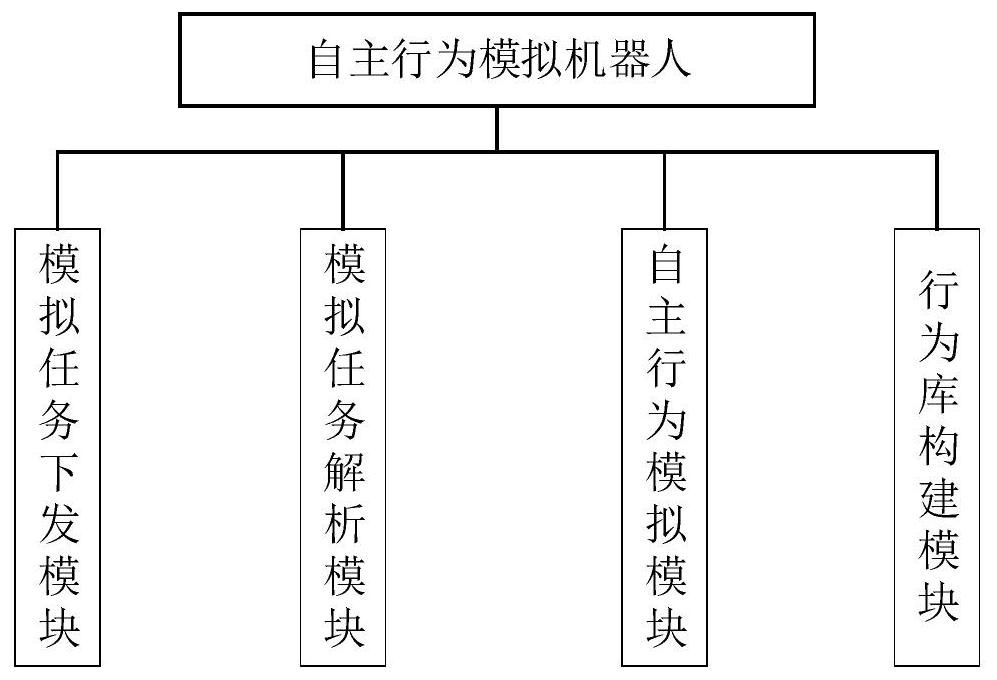
[0057] A Windows Forms application that simulates the behavior of a robot, such as figure 1 As shown, it includes the simulation task delivery module, task configuration file library, simulation task analysis module, autonomous simulation module, behavior library construction module and behavior database;
[0058] The simulated task delivery module is used for: storing the delivered task configuration file in the task configuration file library; the simulated robot will automatically receive the task configuration file. This module is the input module of the simulated robot. The simulation task parsing module is used to: obtain the task configuration file from the task configuration file library, perform parsing operations on the task configuration file, and pass the analyzed simulation parameters to the autonomous simulation module; the autonomous simulation module is used to: after receiving the simulation parameters, Set its own simulation parameters, choose a simulation m...
Embodiment 2
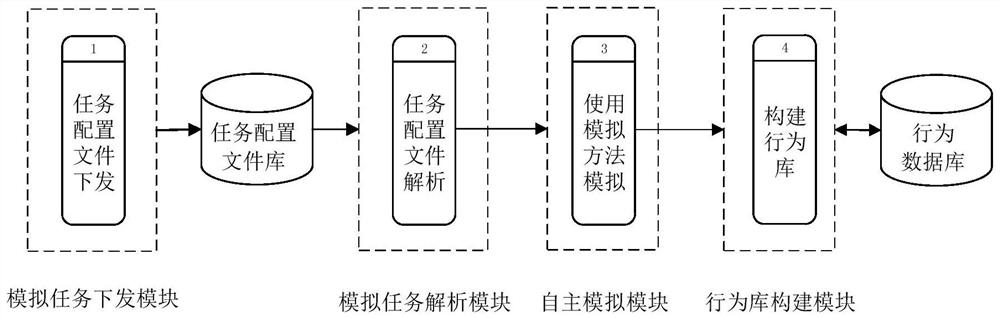
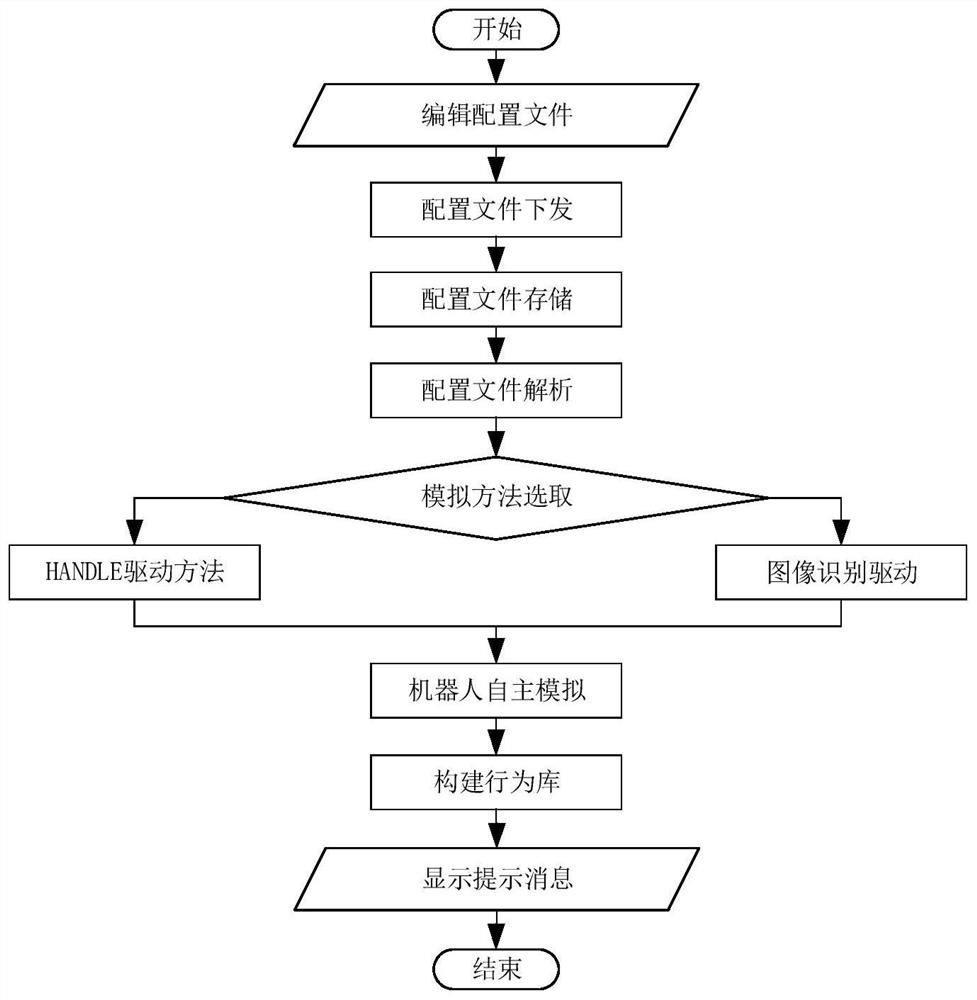
[0061] The working method of a kind of Windows form application program behavior simulation robot described in embodiment 1, such as figure 2 , image 3 shown, including the following steps:
[0062] (1) The task configuration file issued by the simulated task distribution module is stored locally in the computer, and then the task configuration file is stored in the task configuration file library through the communication monitoring inside the computer system;
[0063] (2) The simulation task analysis module obtains the task configuration file from the task configuration file library, performs analysis on the task configuration file, and transmits the simulation parameters obtained by the analysis to the autonomous simulation module. The simulation parameters include the name of the target software to be simulated, the target The set of buttons in the software, the installation path of the target software, the target action or state of the behavior simulation, and the sele...
Embodiment 3
[0086] According to the working method of a kind of Windows form application program behavior simulation robot described in embodiment 2, its difference is:
[0087] In step (3), after the autonomous simulation module receives the simulation parameters, it sets its own simulation parameters, selects the image recognition simulation method, processes multiple pop-up windows of the software through graphic recognition, and locates the buttons of the pop-up windows, such as Figure 5 shown, including the following steps:
[0088] First, use the OCR-based image recognition method to identify the pop-up window and the button of the pop-up window. After recognition, the interface image of the software is converted into picture pixels with two-dimensional position coordinate information; picture pixel information refers to all pixels in the entire screenshot in the screenshot The information includes the position information of the pixel point, that is, the two-dimensional position c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More