

Biomorphic rhythmic movement controller
a rhythmic movement and controller technology, applied in the field of robotics and movement control, can solve the problems of not being able to respond to or adapt based on sensory input, their system is not a robotic system, and no motoneuron output stage, etc., and achieve the effect of sophisticated responsiveness and adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
example no.1
EXAMPLE NO. 1
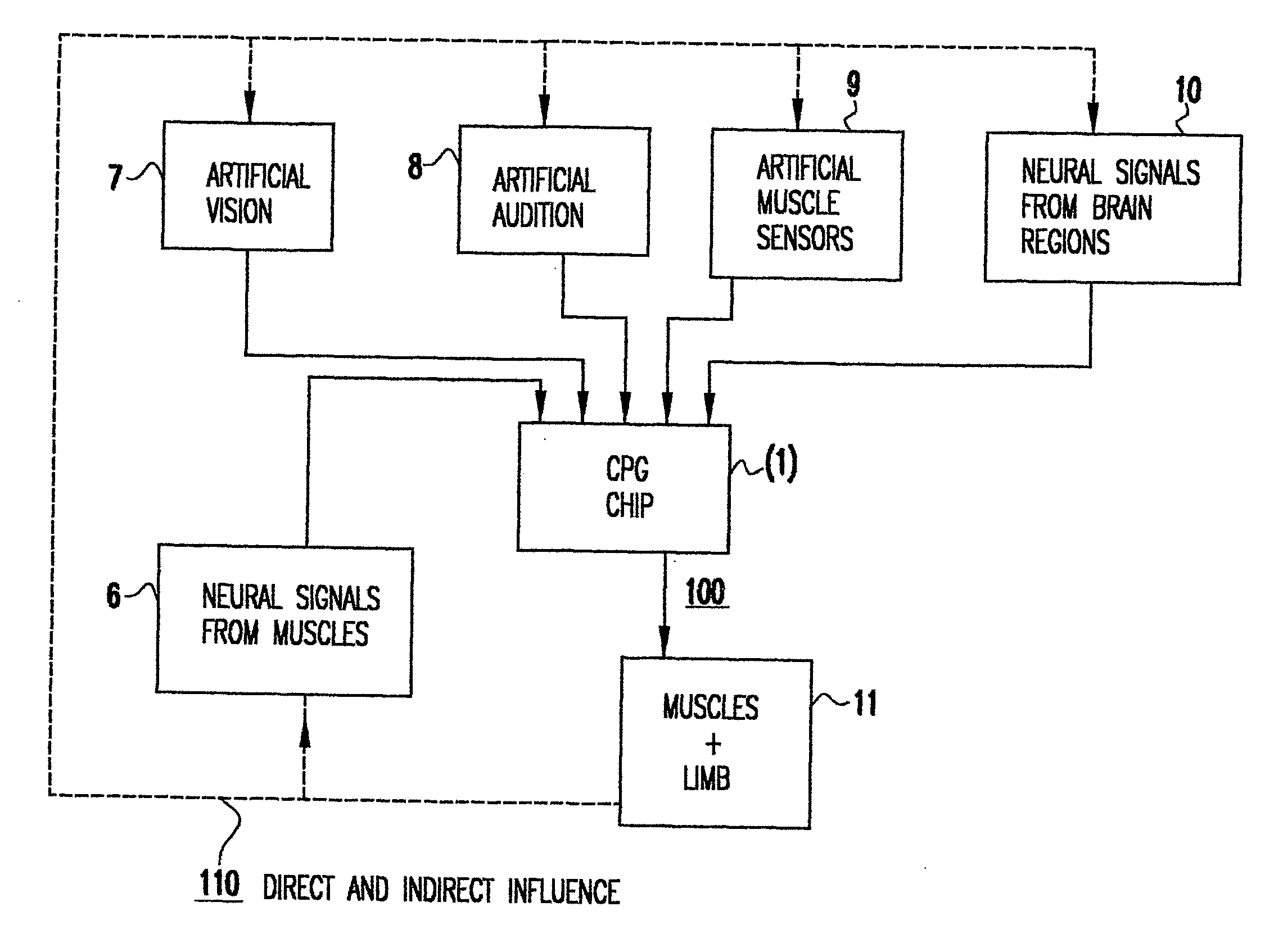
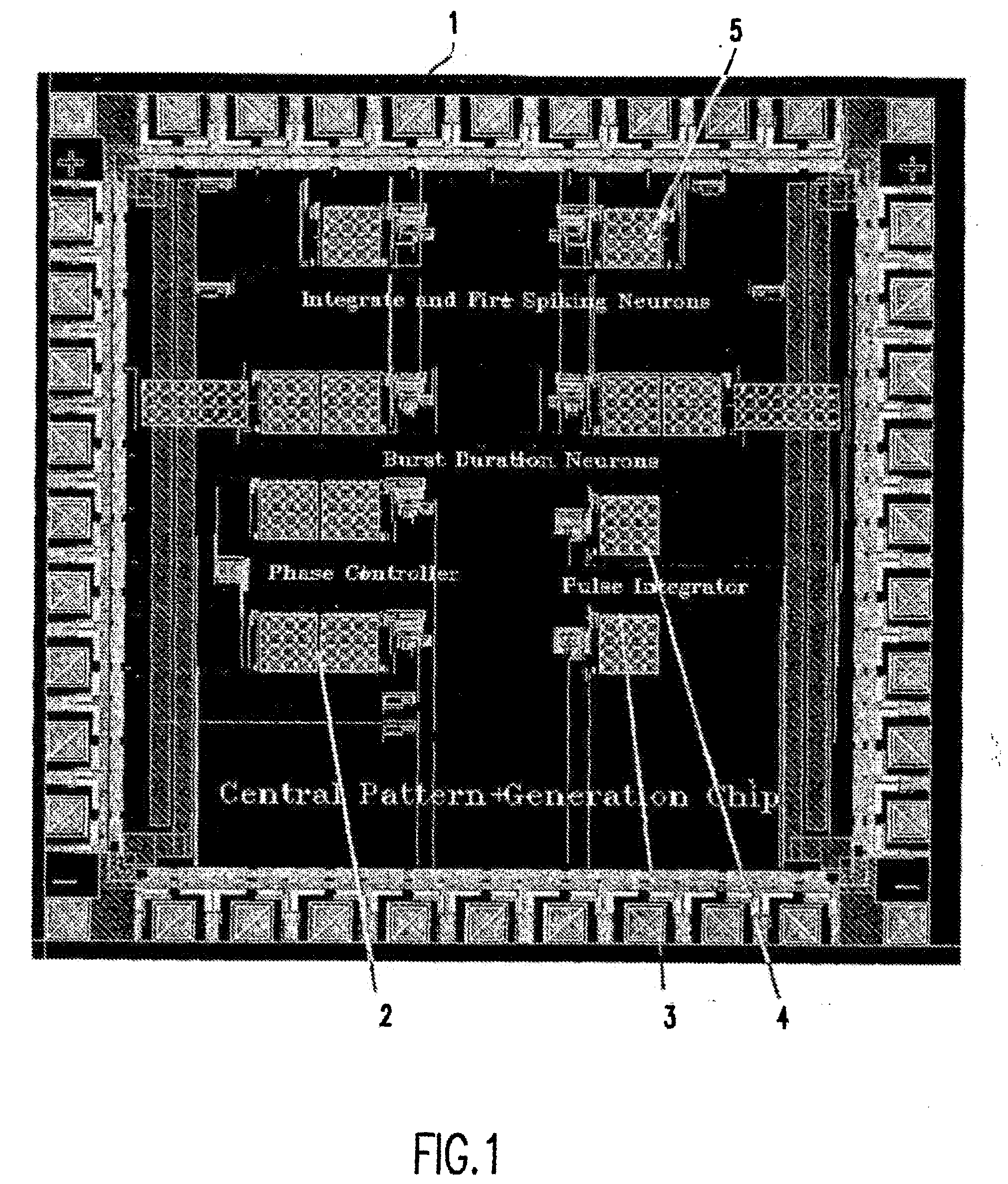
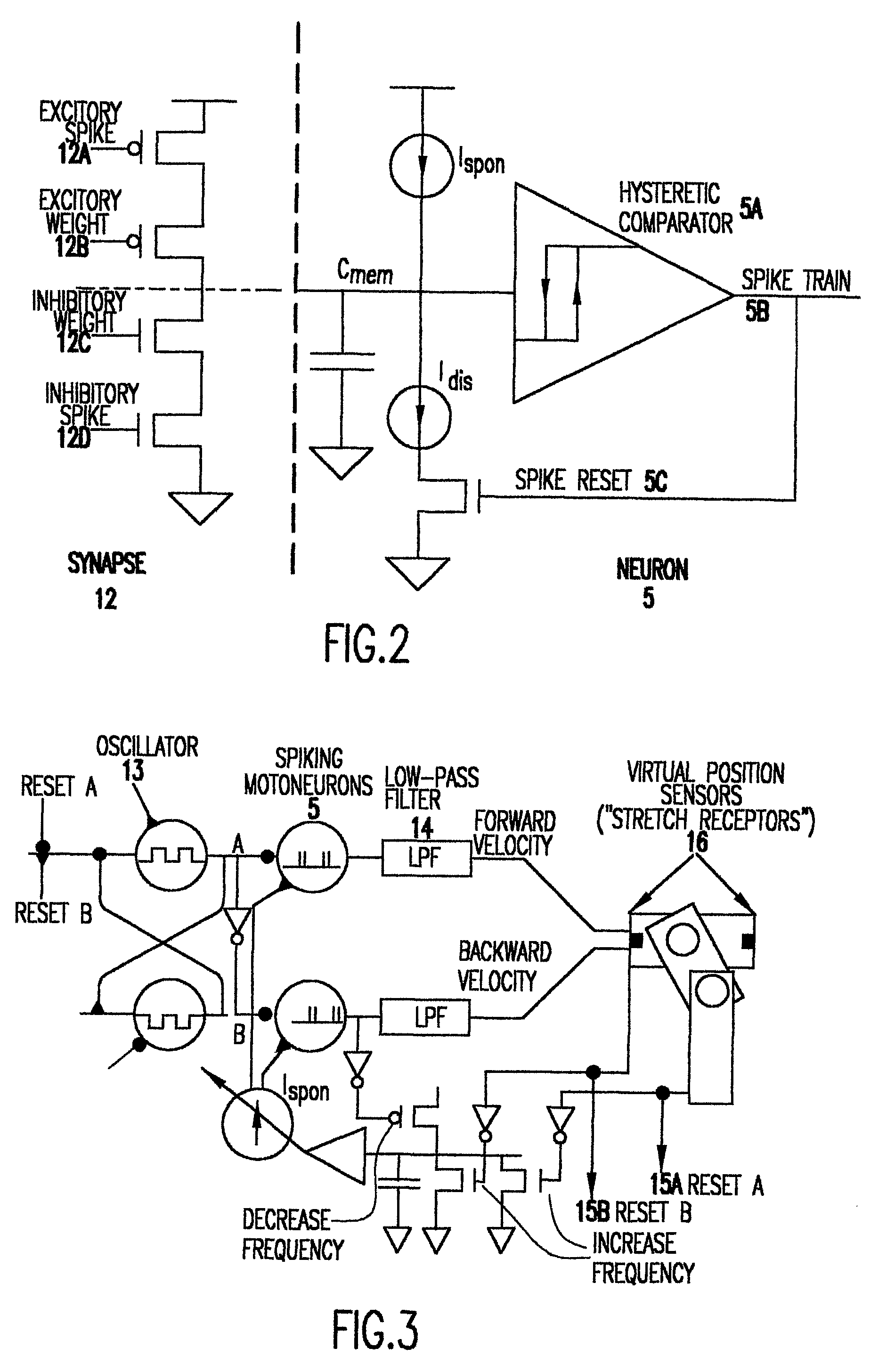
[0087] A robot comprising a biomorphic leg was constructed using a neuromorphic chip on which CPGs were modeled as distributed systems of non-linear oscillators. To provide basic coordination in a leg, two neurons were physically coupled together to achieve oscillations. They were coupled together to be alternatively active, with the alternating activity as the basic coordination that drove the hip of the robot. A phase control circuit governed the phase difference between the neurons. The oscillator neurons drove two integrate-and-fire spiking motoneurons, which drove an actuator. (The spiking neuron could also drive biological muscle or it could also be used to drive a pneumatic cylinder, a McKibben actuator or biomuscle directly).
[0088] The robot used servomotors to provide electrical power. To be compatible with this technology, low-pass filters 14 were applied to the spiking neurons and the resulting smooth graded velocity signal was integrated.
[0089] The circuit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More