

Medical manipulator and medical robot system
a robot system and manipulator technology, applied in the field of medical manipulators and medical robot systems, can solve the problems of presenting itself as an obstacle in the operative field, and it is difficult to provide a wide operative field in the body cavity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
first embodiment
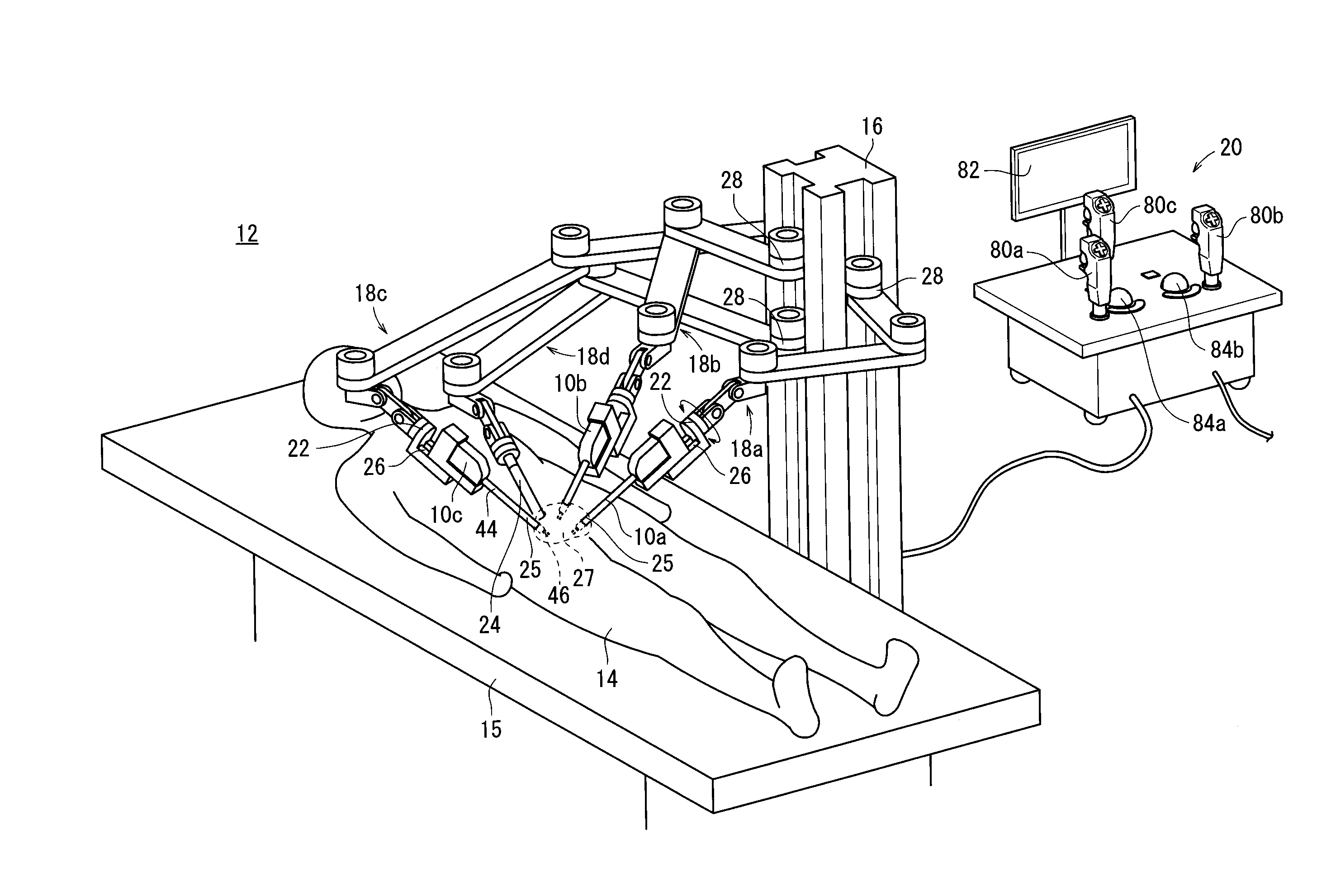
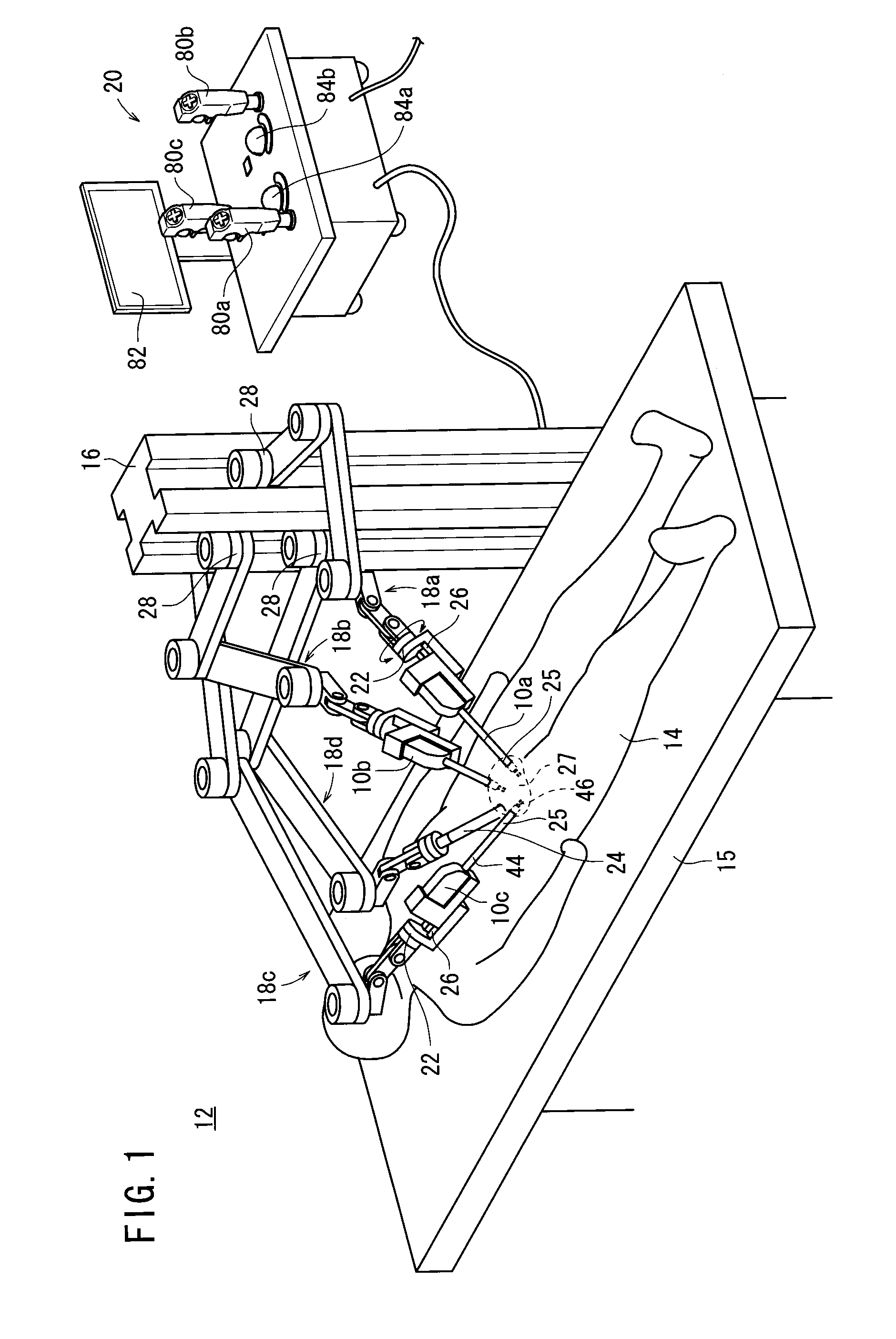
[0056]As shown in FIG. 1, a medical manipulator 10c and a medical robot system 12 according to the present invention are particularly suitable for performing a laparoscopic surgical operation on a patient 14.
[0057]The medical robot system 12 comprises a station 16 disposed near a surgical bed 15, four robot arms 18a, 18b, 18c, 18d mounted on the station 16, and a console (controller) 20 for controlling the medical robot system 12 in its entirety. The robot arm 18c will also be referred to as a first robot arm, and the robot arm 18d as a second robot arm. The robot arms 18a through 18d and the console 20 may be connected to each other by a communication means comprising a wired link, a wireless link, a network, or a combination thereof. The console 20 is not required to control the medical robot system 12 in its entirety, but the robot arms 18a through 18d may be feedback-controlled by internal controllers combined with the medical robot system 12. The robot arms 18a through 18c may ...
second embodiment
[0128]FIG. 19 is a schematic view illustrative of a medical robot system according to the present invention. FIG. 19 shows manipulators 10d, 10e and an endoscope 24, which are constituent elements of the medical robot system.
[0129]The medical robot system according to the second embodiment differs from the medical robot system 10 according to the first embodiment in that the manipulator 10d having a different structure from the manipulator 10a is provided at the distal end of the robot arm 18a and the manipulator 10e having a different structure from the manipulator 10b is provided at the distal end of the robot arm 18b.
[0130]A rod-shaped member 44d of the manipulator 10d has an intermediate joint 60d in an intermediate portion thereof, and a rod-shaped member 44e of the manipulator 10e has an intermediate joint 60e in an intermediate portion thereof. The intermediate joints 60d, 60e have the same structure as the first intermediate joint 58 shown in FIGS. 2 and 4. More specificall...
third embodiment
[0144]FIG. 20 is a schematic view illustrative of a medical robot system according to the present invention. FIG. 20 shows manipulators 10c, 10d and an endoscope 24, which are constituent elements of the medical robot system.
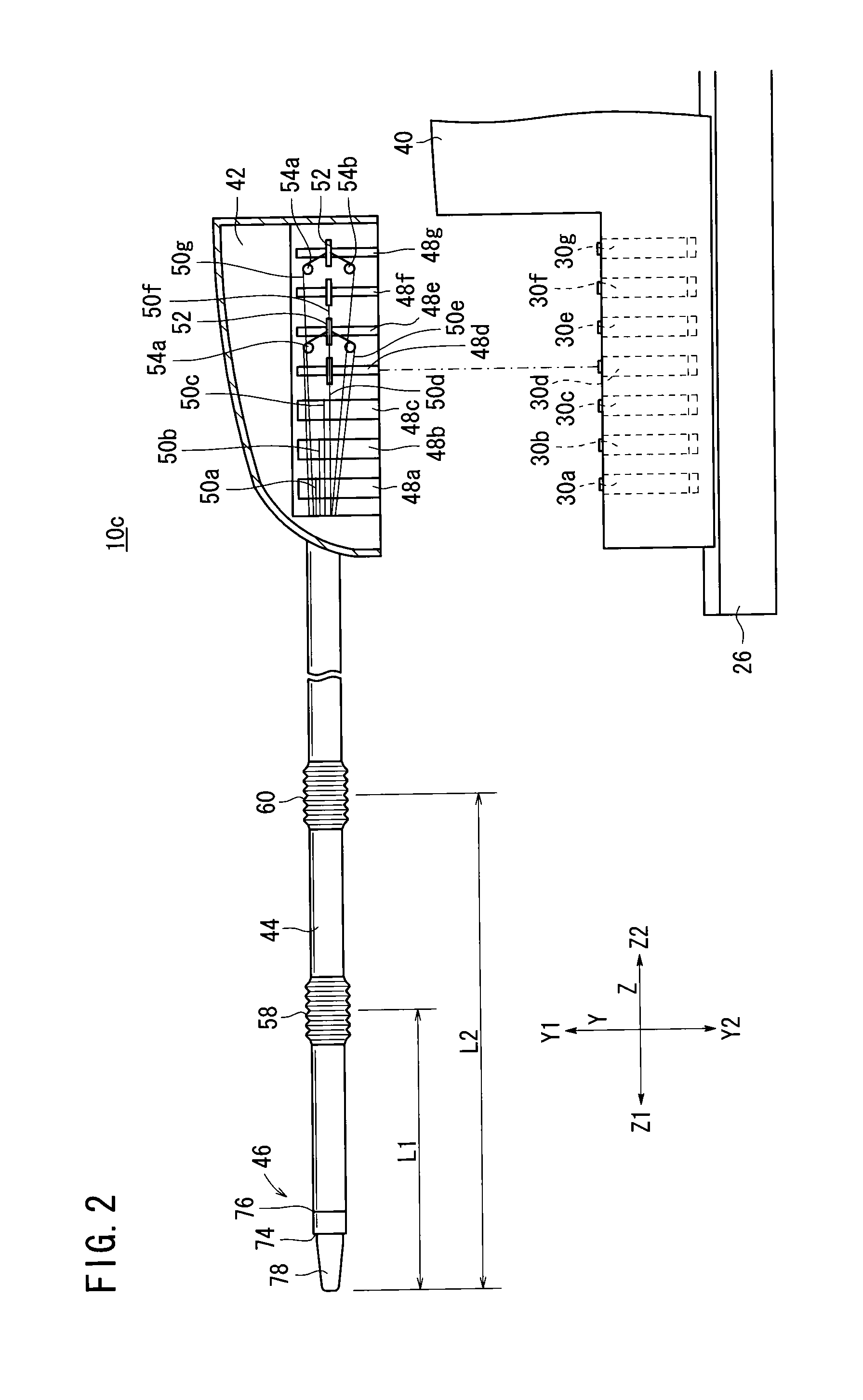
[0145]The medical robot system according to the third embodiment is a medical robot system in which the manipulator 10c (see FIG. 2) of the medical robot according to the first embodiment, instead of the manipulator 10e, is applied to the medical robot system according to the second embodiment. The manipulator 10d that is provided at the distal end of the robot arm 18a has the same structure as the manipulator 10d according to the second embodiment.
[0146]As described above, the manipulator 10c has the first intermediate joint 58 and the second intermediate joint 60, and accordingly the rod-shaped member 44 can be bent at two points. Thus, the manipulator 10c has greater flexibility to its possible shape, compared to the manipulator 10e (see FIG. 19). The trocar ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More