

Occlusion handling for computer vision
a computer vision and object technology, applied in image analysis, image enhancement, instruments, etc., can solve problems such as system failure, system failure, and system failure, and achieve the effect of avoiding system failure, avoiding system failure, and avoiding system failur
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026]The word “exemplary” or “example” is used herein to mean “serving as an example, instance, or illustration.” Any aspect or embodiment described herein as “exemplary” or as an “example” is not necessarily to be construed as preferred or advantageous over other aspects or embodiments.
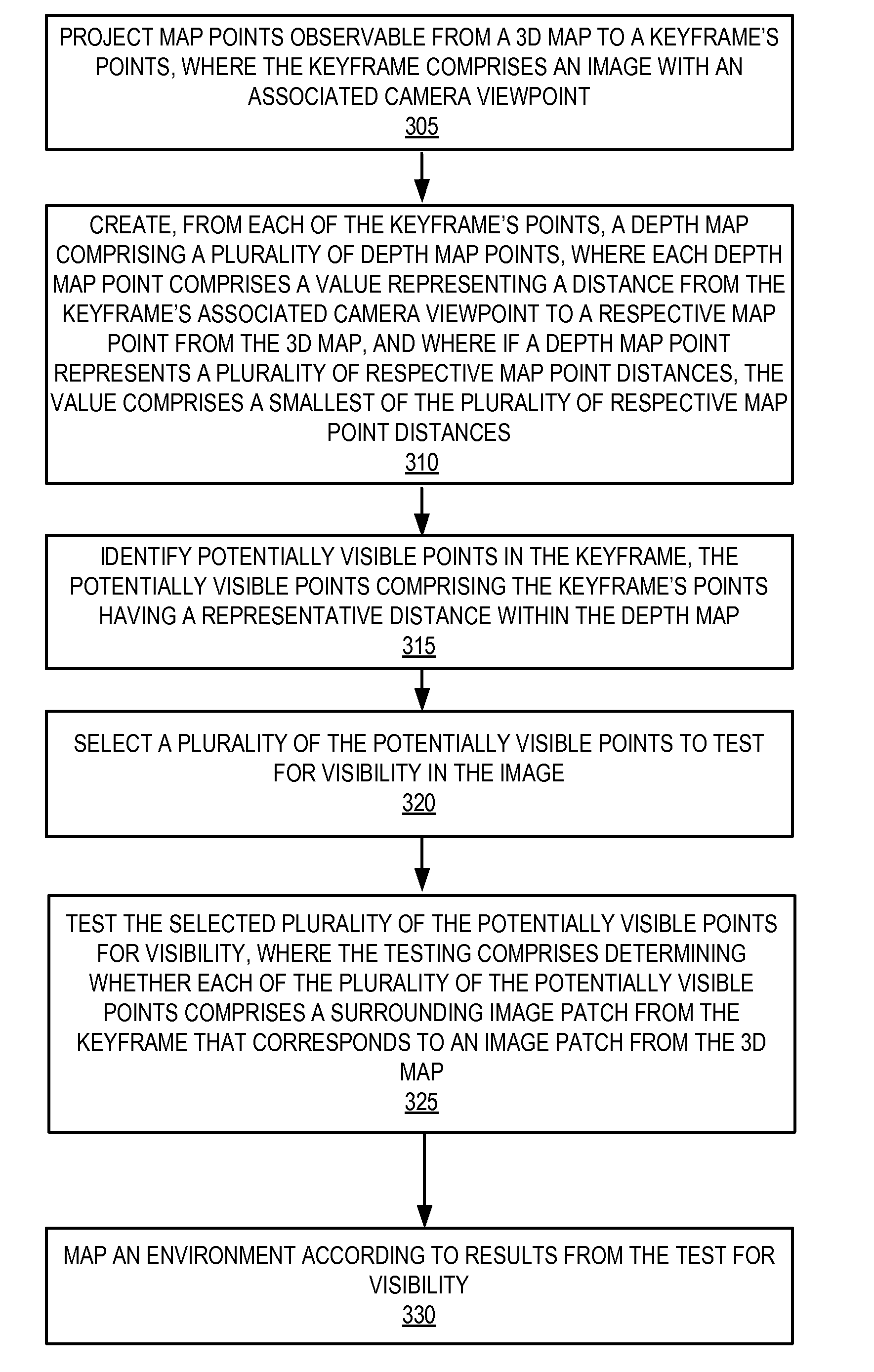
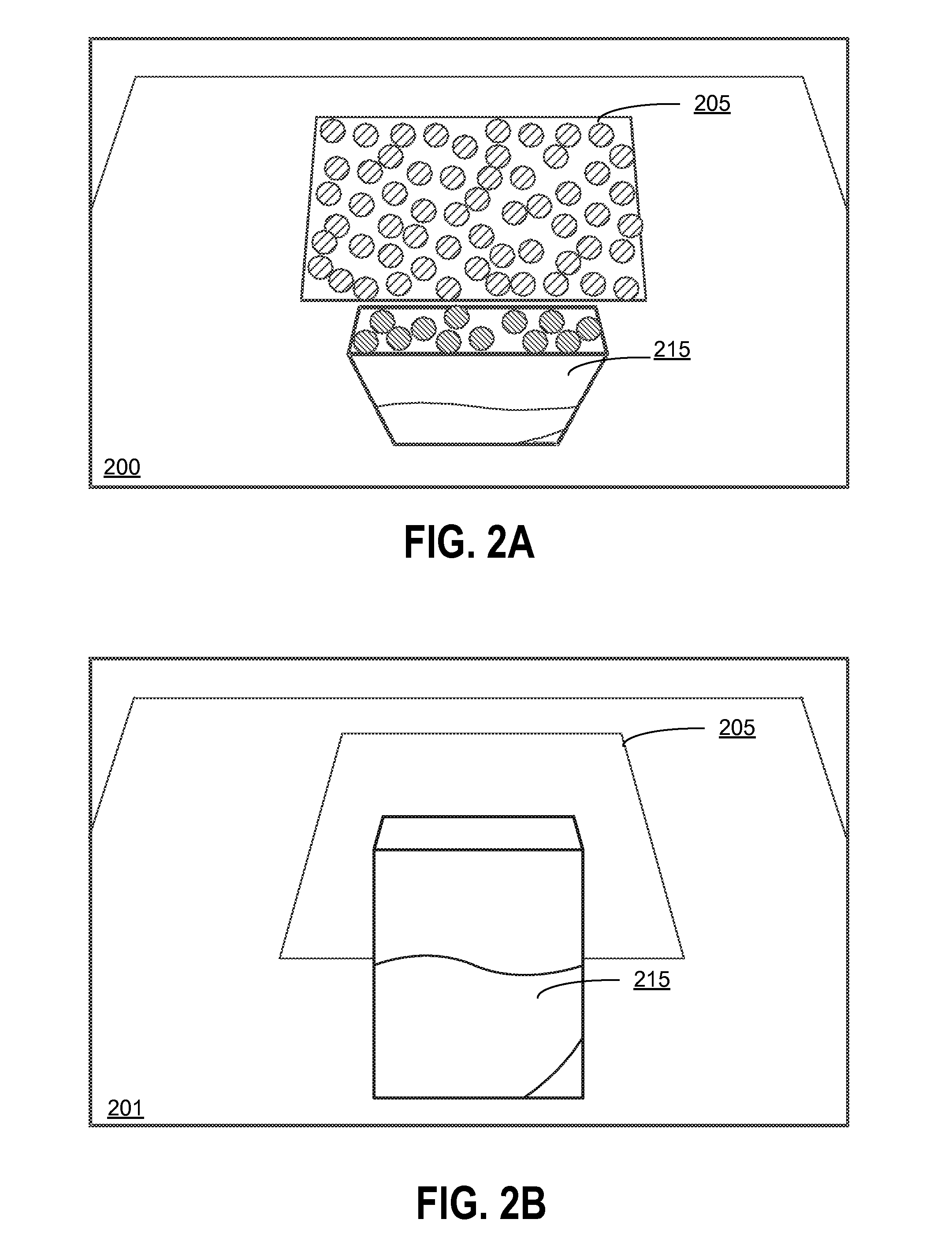
[0027]In one embodiment, Occlusion Handling for Computer Vision (described herein as “OHCV”) filters occluded map points with a depth-map and determines visibility of a subset of points. 3D points in a 3D map have a known depth value (e.g., as a result of Simultaneous Localization and Mapping (SLAM) or other mapping method). In one embodiment, OHCV compares depth of 3D points to depths for equivalent points (e.g., points occupying a same position relative to the camera viewpoint) in a depth mask / map. In response to comparing two or more equivalent points, points with a greater depth (e.g., points farther away from the camera position) are classified as occluded. Points without a corresponding depth ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More