

Speed look-ahead control method based on filter technique
A speed forward-looking and filtering technology, which is applied in the direction of program control, computer control, general control system, etc., can solve the problems of unsmooth speed curve, inability to calculate connection speed, inability to meet high-speed processing and high sampling frequency, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with accompanying drawing.
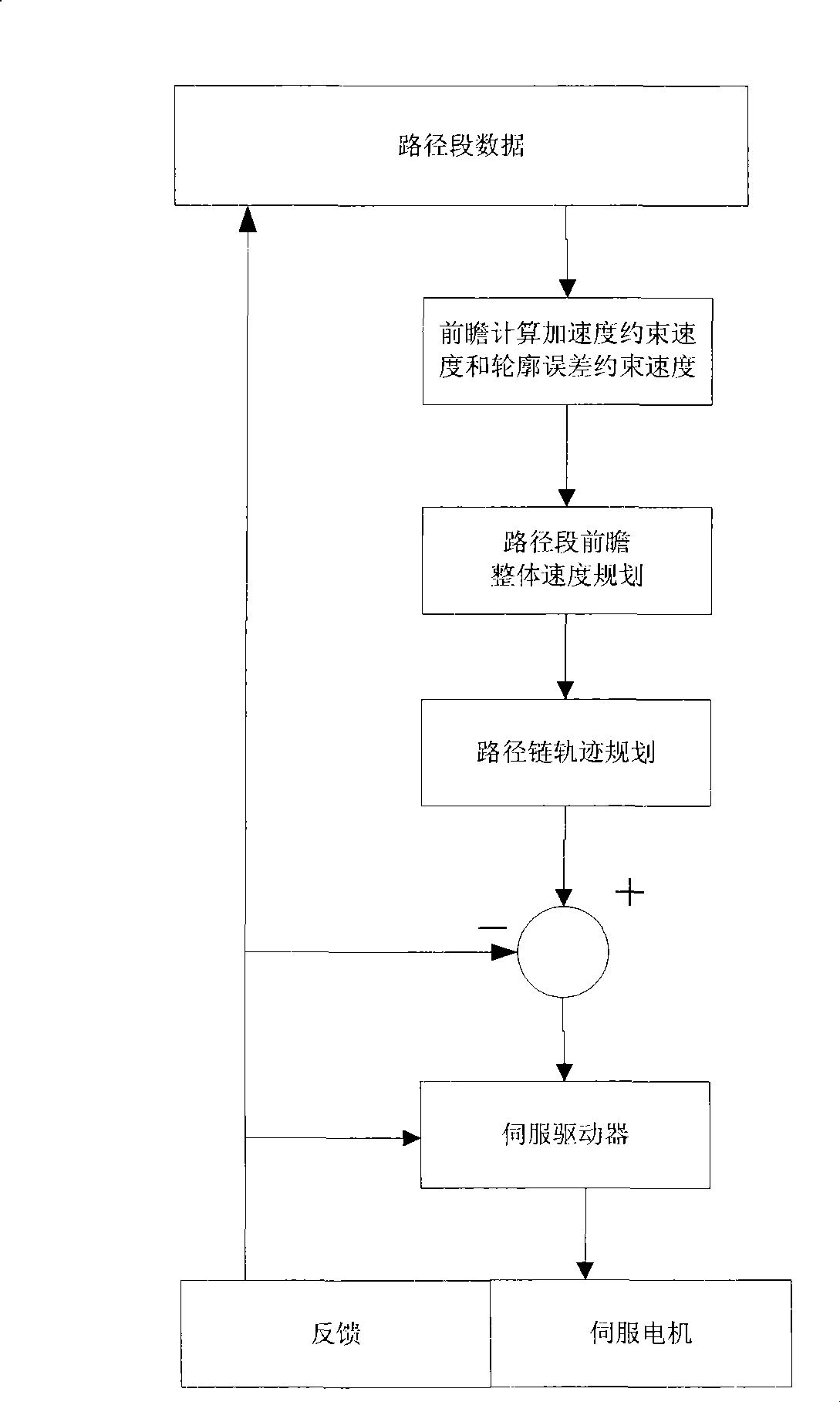
[0054] In this embodiment, the hardware platform adopts full digital control mode, standard industrial grade IPC board card, PM-1GHz CPU as the numerical control system controller, and the axis adopts MECHATROLINK bus control mode. The open numerical control system developed on the basis of this platform is an integrated numerical control system, giving full play to its characteristics of fast calculation speed and powerful functions, and completes functions such as display, interpolation calculation, and motion control through software. In this CNC system, the motion controller is the core. After adopting the speed forward control method based on filtering technology, the component structure of the motion controller is as follows: figure 1 shown.
[0055] The method of the present invention is based on the acceleration and deceleration characteristics of the filtering tec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More