Multi-eye stereo camera shooting method and device
A stereo camera and image technology, applied in the field of image processing, can solve problems such as inability to solve long-distance and short-distance measurement, inability to meet both requirements, configuration schemes that cannot be assembled on the front or top of the vehicle, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
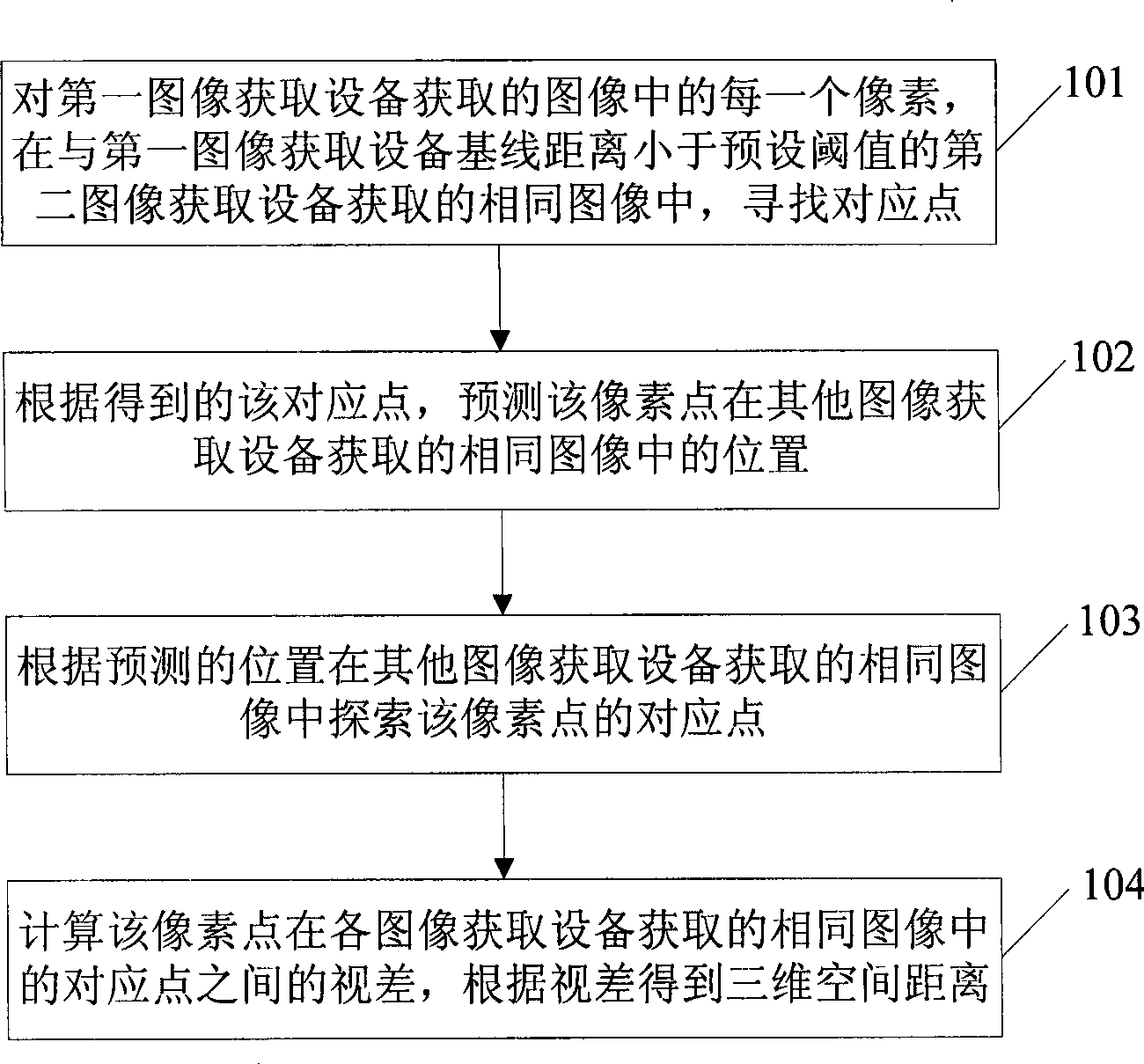
[0040] see figure 2 , the embodiment of the present invention provides a multi-eye stereo camera method. The embodiment of the present invention uses three image acquisition devices as an example for illustration. More than three image acquisition devices are not excluded. The method includes:
[0041] 101: For each pixel in the image acquired by the first image acquisition device, find a corresponding point in the same image acquired by the second image acquisition device with the smallest baseline distance from the first image acquisition device;
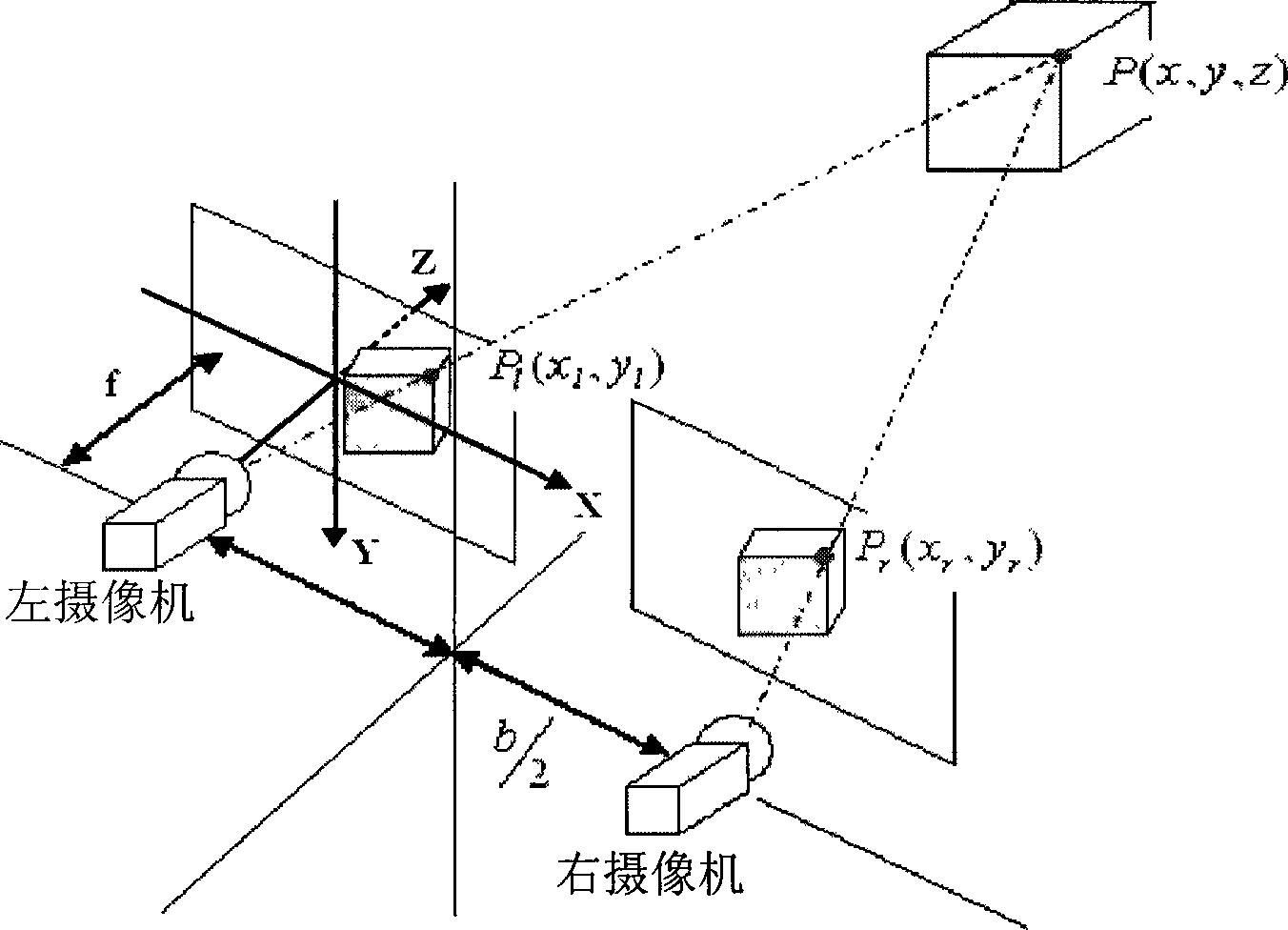
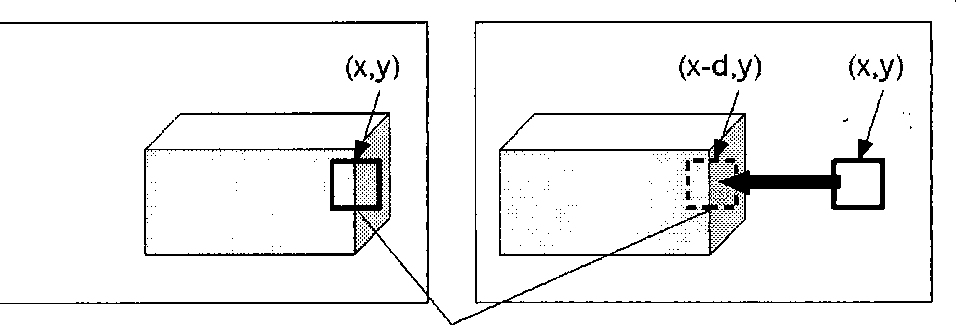
[0042] Specifically, it is assumed that the three image acquisition devices are divided into 1, 2 and 3, and the same images acquired by the three image acquisition devices are also called trinocular stereo images, see image 3 , assuming that the pixel point of the three-dimensional space point P in the image I1 acquired by the image acquisition device 1 is (x1, y1), and the baseline distance between the image acquisition device...
Embodiment 2
[0067] see Figure 5 , the embodiment of the present invention provides a multi-eye stereo camera device, the embodiment of the present invention is described by taking three image acquisition devices as an example, and does not exclude more than three image acquisition devices, the device includes:
[0068] The search module 501 is configured to, for each pixel in the image acquired by the first image acquisition device, find a corresponding point in the same image acquired by the second image acquisition device having the shortest baseline distance from the first image acquisition device;
[0069] Specifically, it is assumed that the three image acquisition devices are divided into 1, 2 and 3, and the same images acquired by the three image acquisition devices are also called trinocular stereo images, see image 3 , assuming that the pixel point of the three-dimensional space point P in the image I1 acquired by the image acquisition device 1 is (x1, y1), and the baseline dis...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap