

Method and apparatus for robot calibrations with a calibrating device
A technology for calibrating devices and manipulators, applied in manipulators, using optical devices, program-controlled manipulators, etc., can solve the problems of time, cost complexity and cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
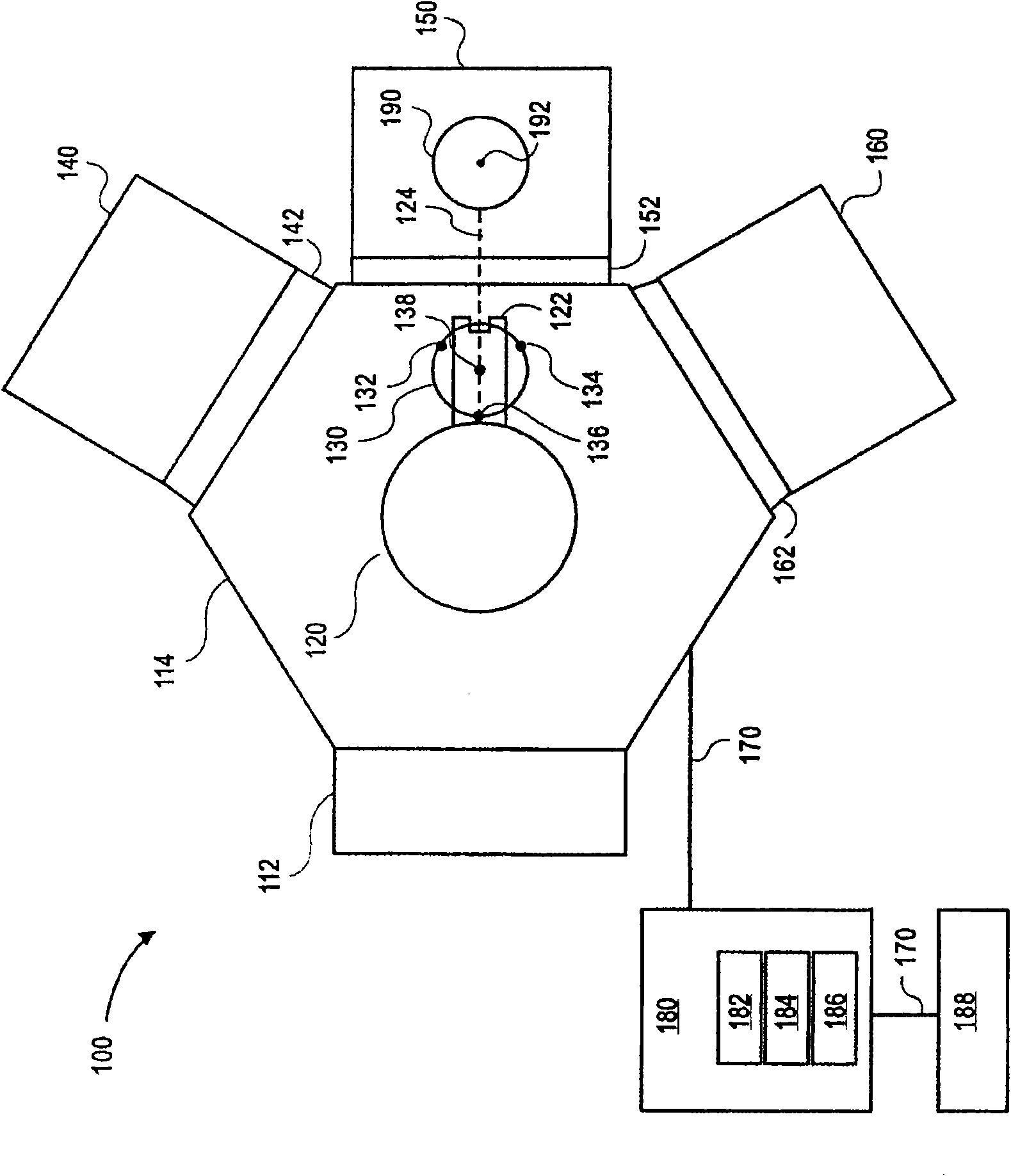
[0030] Described herein are methods and apparatus for performing calibration of manipulator elements. In one embodiment, a method for performing a manipulator calibration includes sensing a start point and an end point of a target with sensors positioned on a calibration device. The method further includes calculating a center of the object based on the start point and the end point of the object. The method further includes determining an offset between the center of the target and the manipulator blade positioned at the reference position. The method further includes calibrating the manipulator position based on the offset.
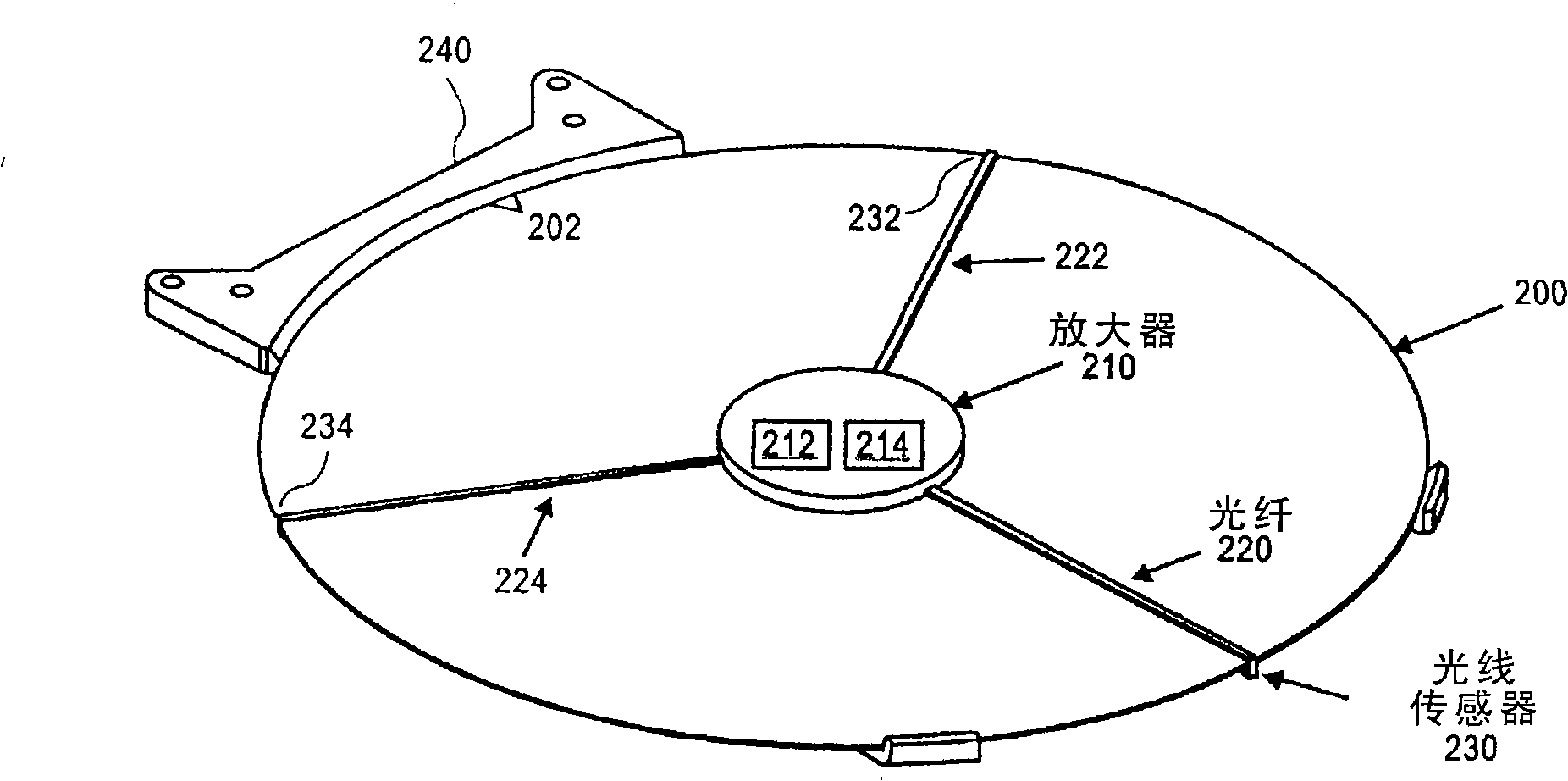
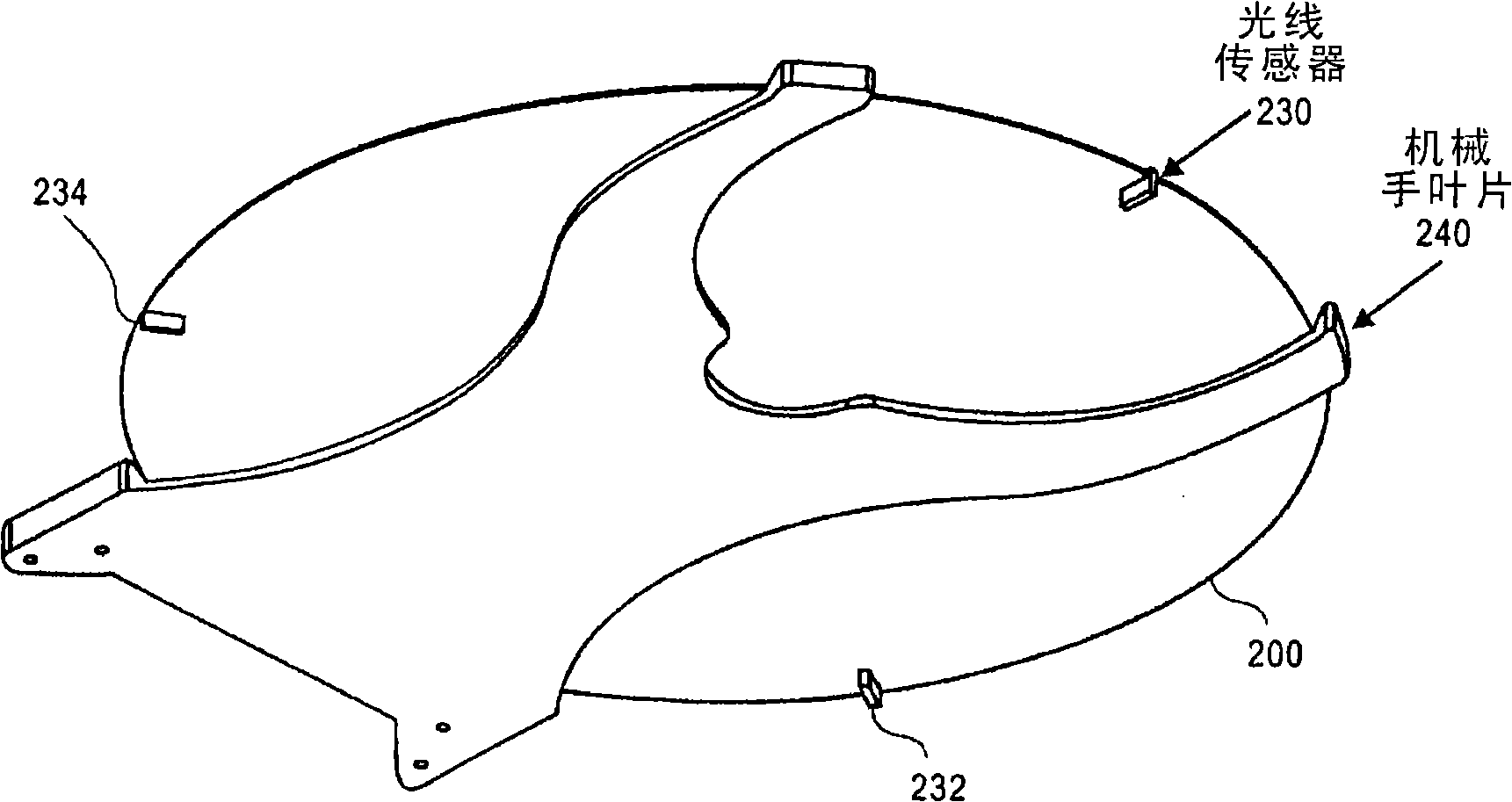
[0031] In another embodiment, a method for performing robot calibration includes moving a calibration device across a target (eg, a wafer chuck). The method then includes using a sensor positioned on the calibration device to measure the distance between a spot of light from the sensor and the perimeter of the target. Next, the method includes determ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More