

Painting robot position planning method for large-scale free-form surface
A spraying robot, free technology, applied in the fields of instruments, computing, electrical and digital data processing, etc., can solve the problems of large demand for planning and low efficiency of offline spraying planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
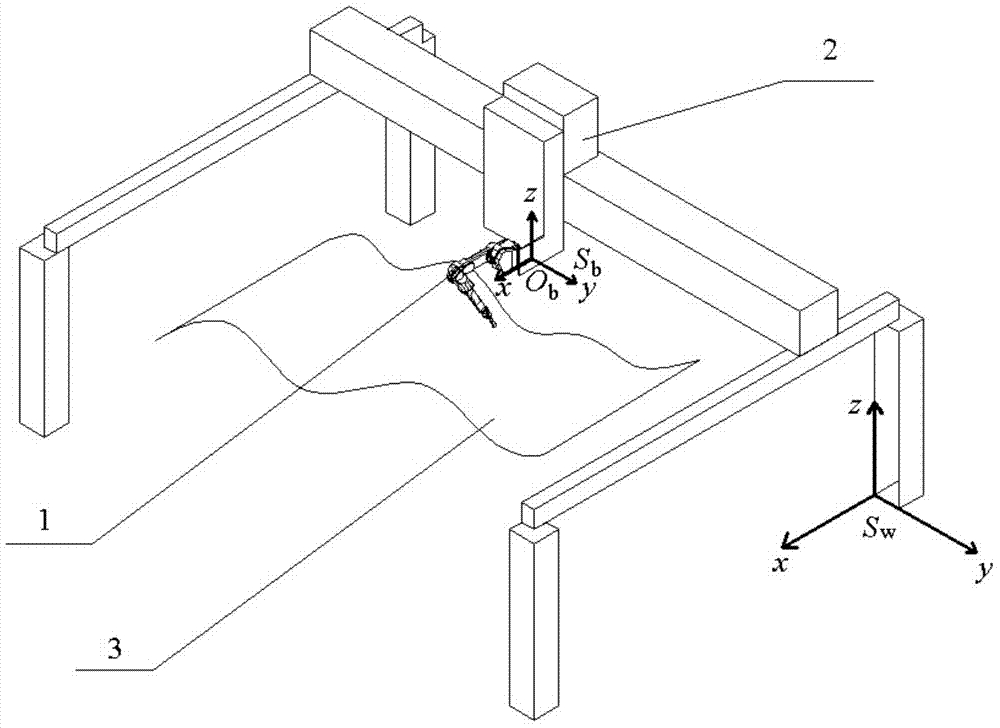
[0029] For large free-form surfaces, the workspace of common 6-DOF spraying robots can only cover a small area on it. In order to use as few spraying robots as possible to complete the spraying of large free-form surfaces, the spraying robot should be installed on a three-dimensional mobile platform with a large stroke. The three-dimensional mobile platform will transport the spraying robot to a suitable position and keep it still. Robots do the painting. When the spraying robot is spraying, the position where the origin of the base coordinate system is located is called the station. The station planning of the spraying robot on the large free-form surface is to find a suitable station for each free-form surface in the large free-form surface on the basis of completing the trajectory planning of the spray gun, so that the spraying robot can satisfy the requirements of the robot itself when moving according to the trajectory of the spray gun. Joint angle and angular velocity a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More