

Three-dimensional mechanical hand
A manipulator, three-dimensional technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as high requirements, automatic sampling of samples, and inability to complete sample adding arms.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
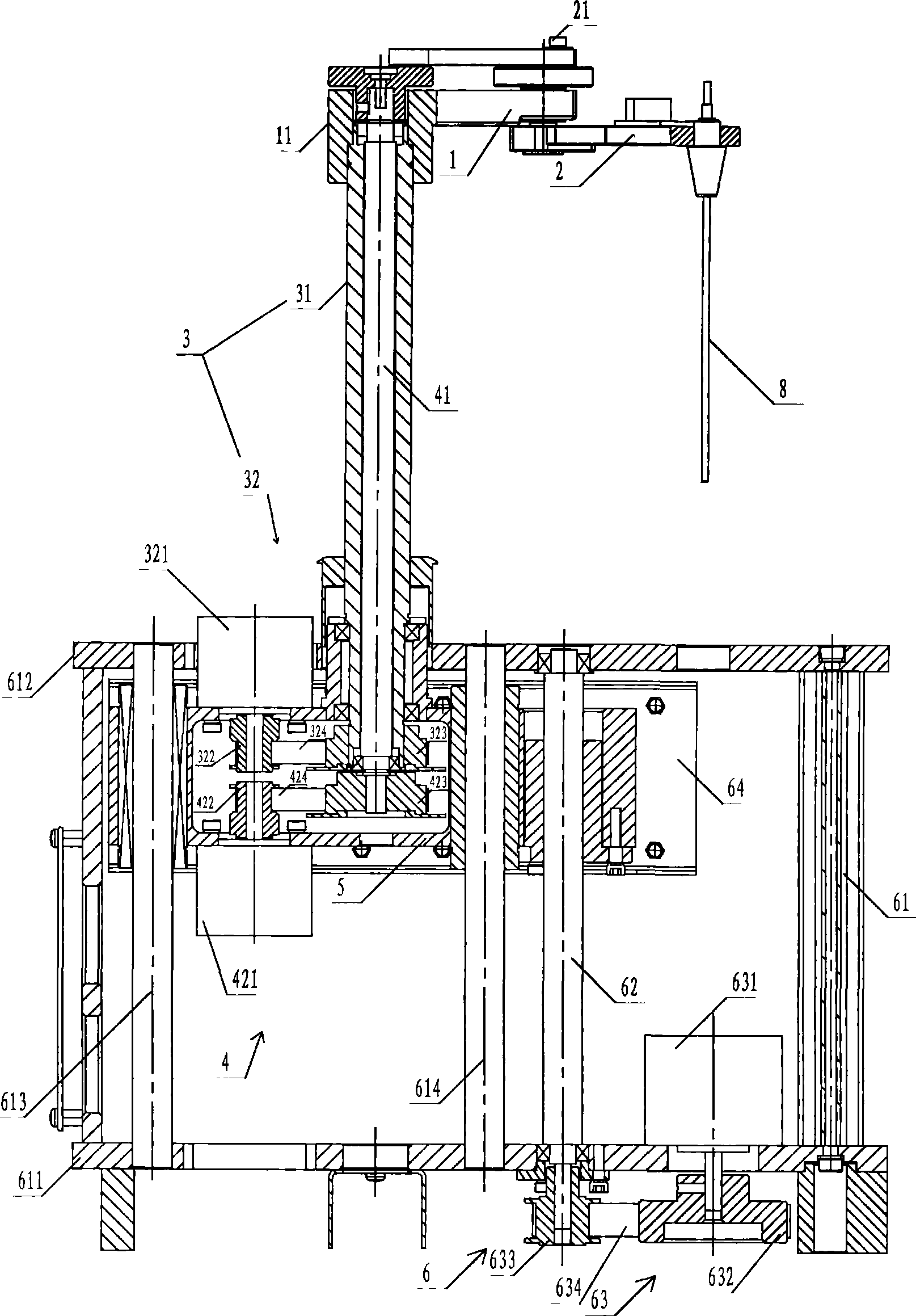
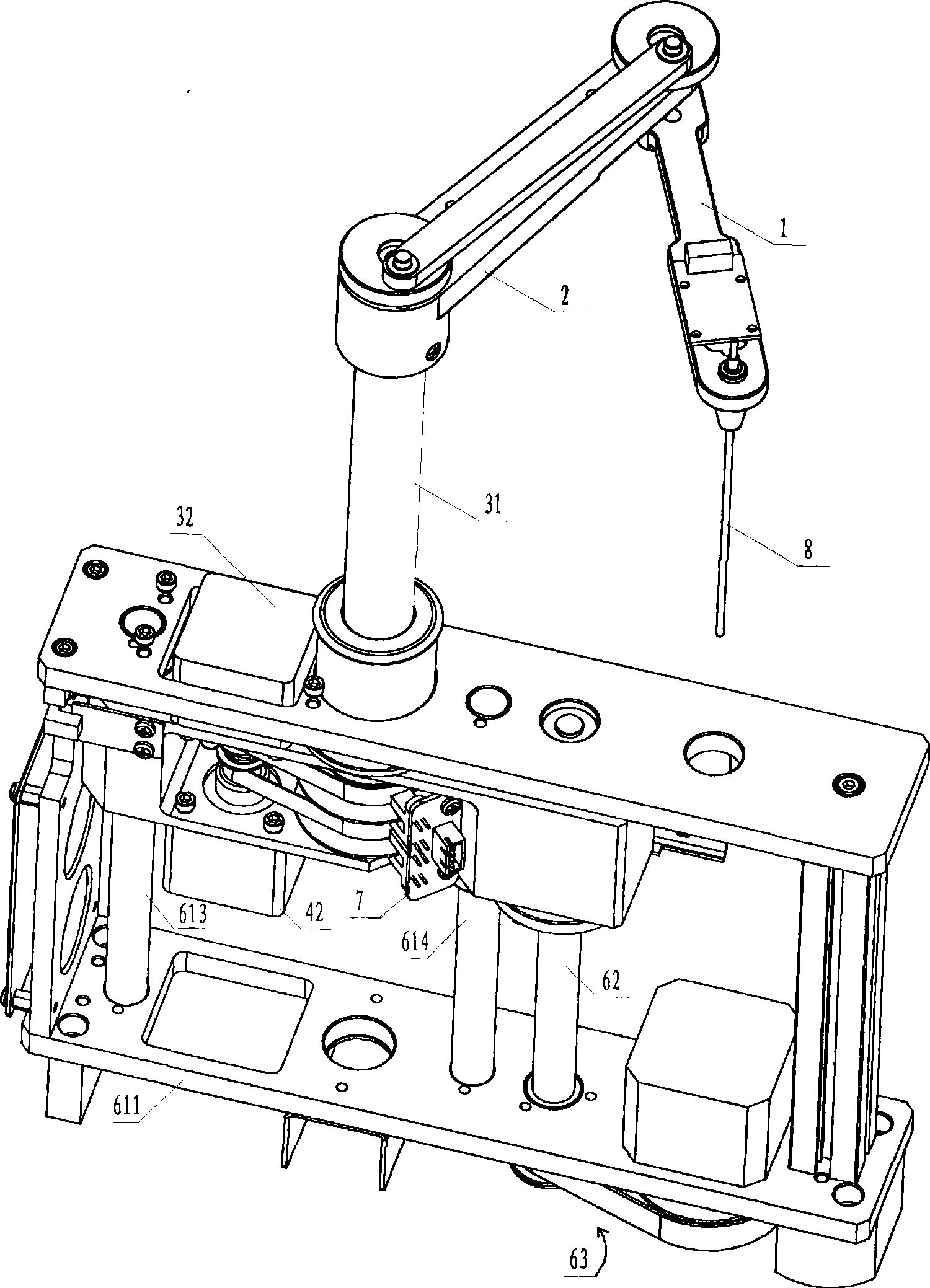
[0050] see figure 1 . A three-dimensional manipulator, comprising: a terminal mechanical arm 1, a front end mechanical arm 2, a first driving mechanism 3, a second driving mechanism 4, an installation frame 5, a lifting mechanism 6; a sensor group 7, and a sampling needle 8.
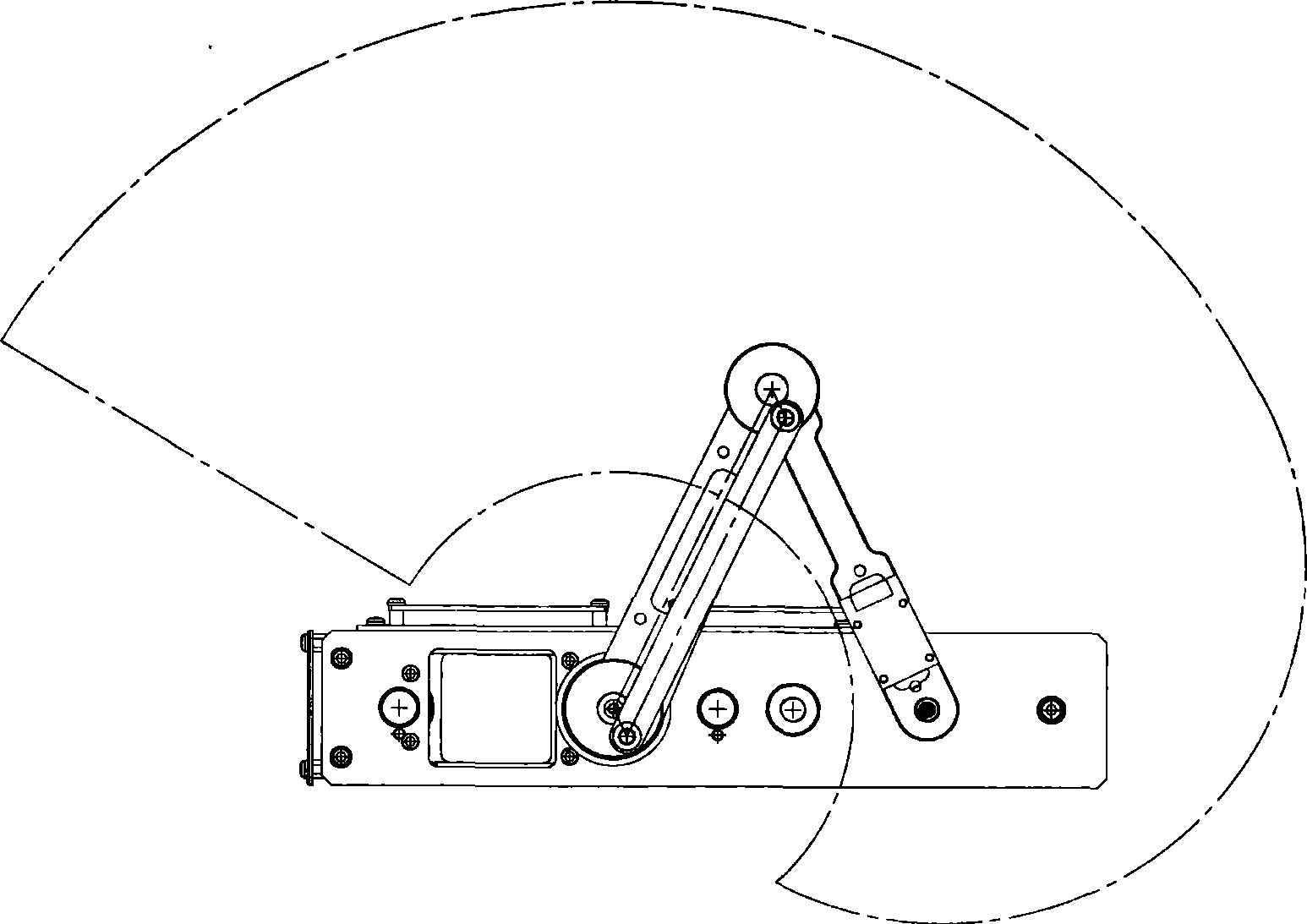
[0051] The upper surface of the end of the front-end mechanical arm 2 has a pin 21, and the front end of the end-end mechanical arm 2 is provided with a mounting hole. The terminal mechanical arm 2 is flexibly connected. In this way, the front-end mechanical arm 1 can swing around the junction of the front-end mechanical arm 1 and the terminal mechanical arm 2 .
[0052] The first drive mechanism 3 and the second drive mechanism 4 are installed on the installation frame 5...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More