

Monomer automatic transformable robot with self-assembly characteristic
A technology of self-deformation and robotics, applied in the field of robotics, can solve problems such as difficult to meet requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
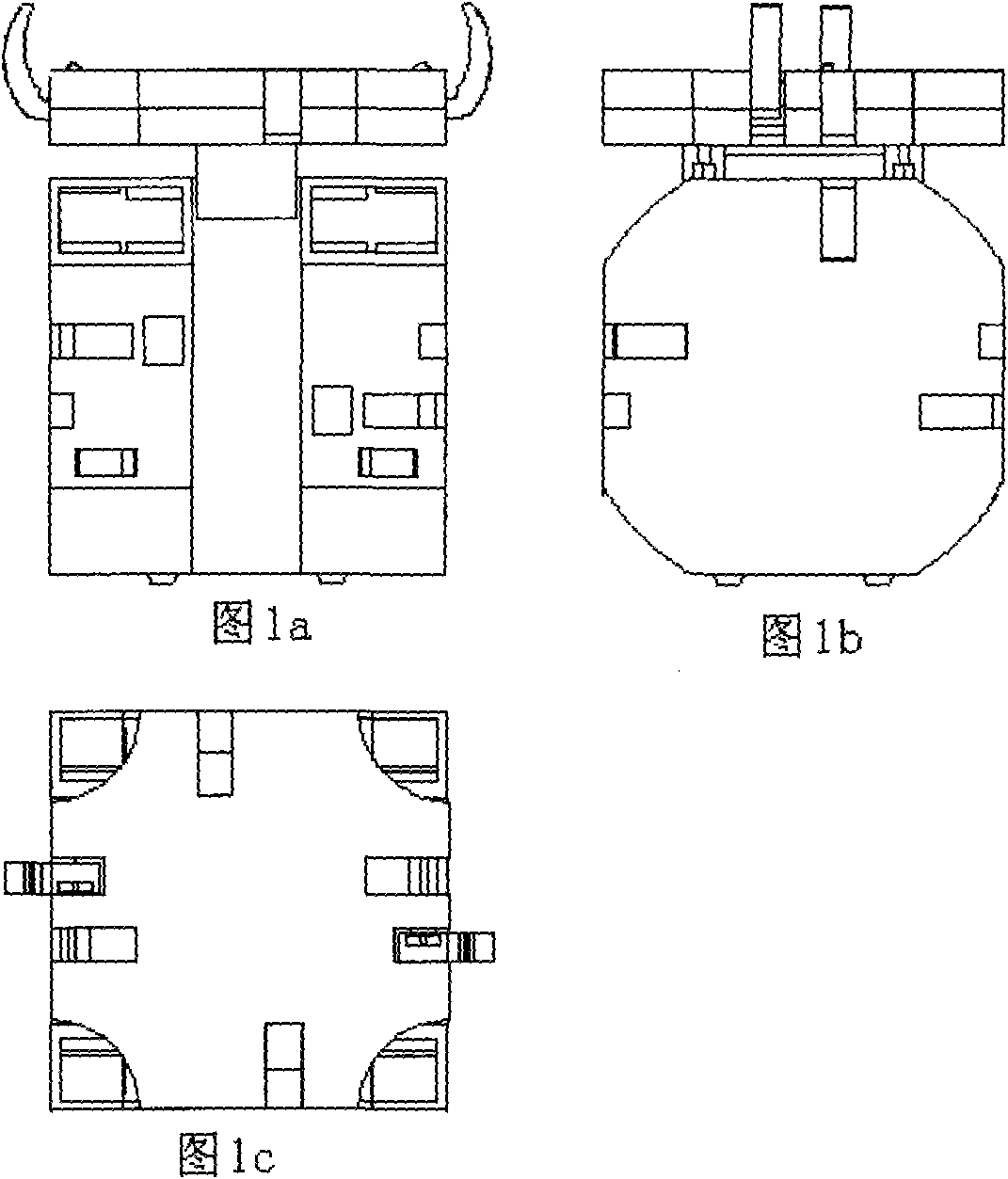
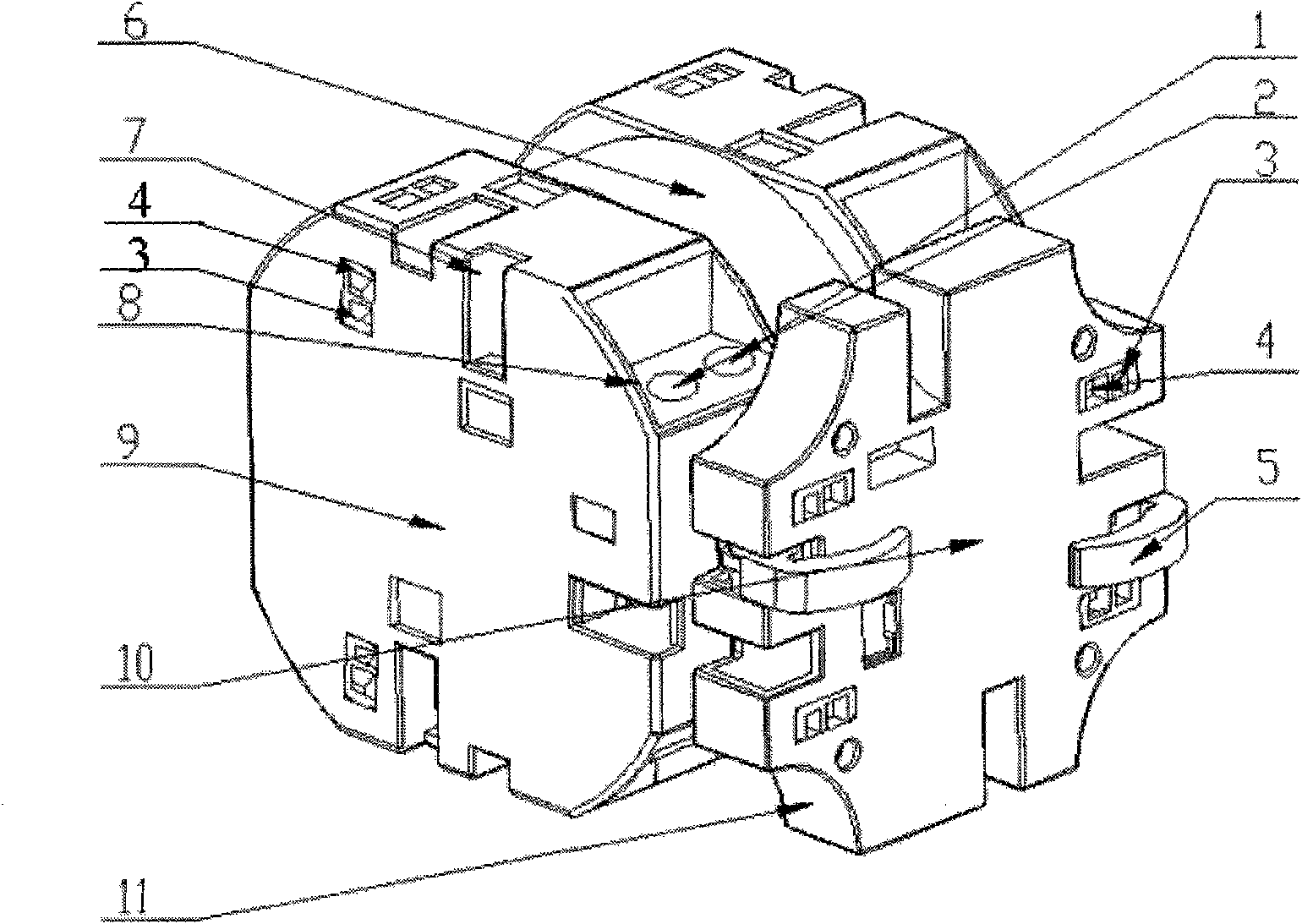
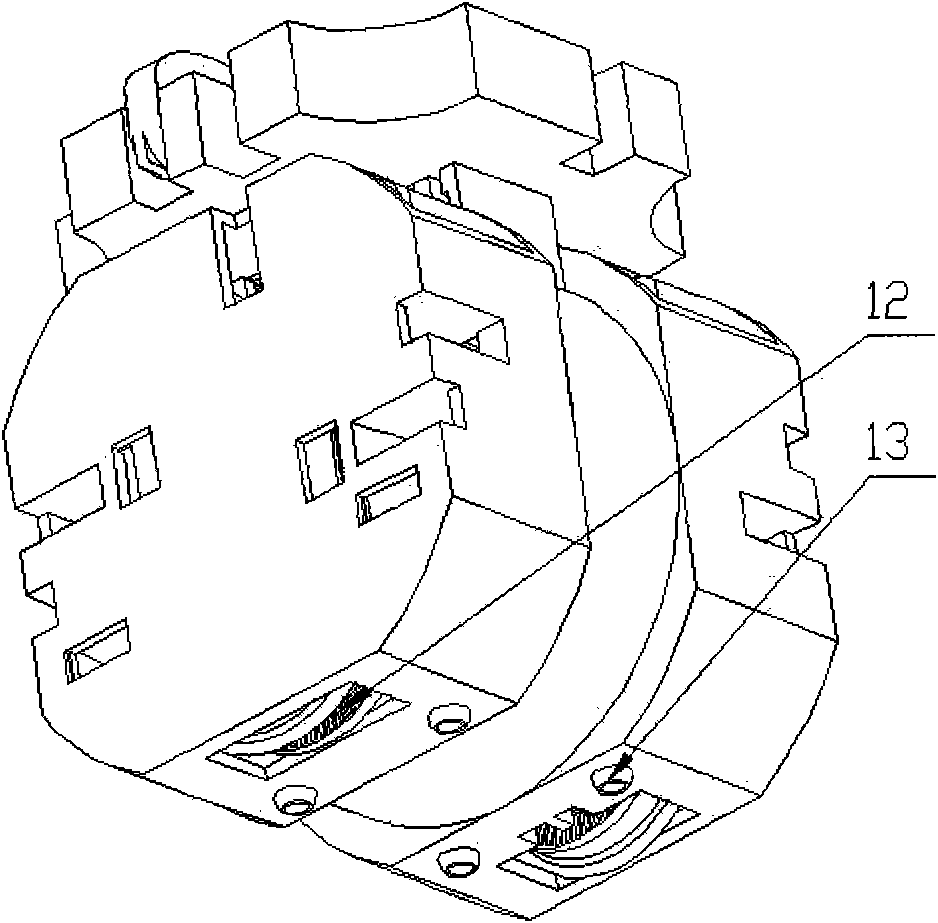
[0016] A preferred embodiment of the single self-deformable robot with self-assembly features of the present invention includes a mobile base, a docking platform is provided on the mobile base, and a docking platform is provided between the docking platform and the mobile base. a rotation mechanism, used to drive relative rotation between the docking platform and the mobile base;
[0017] The mobile base includes a plurality of docking surfaces for docking with docking platforms of other single self-deformable robots;
[0018] Multiple pairs of infrared emitting sensors and infrared receiving sensors are respectively installed on the docking surface and the docking platform for realizing docking guidance.
[0019] Specifically, the mobile base may include 6 surfaces including front, rear, left, right, upper and lower, wherein the lower surface is the moving surface; the other 5 surfaces are docking surfaces.
[0020] The moving surface can be provided with two driving wheels,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More