

Planar multi-degree-of-freedom robot
A robot, degree of freedom technology, applied in the field of robotics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Specific embodiments of the present invention will be described below in conjunction with the accompanying drawings.
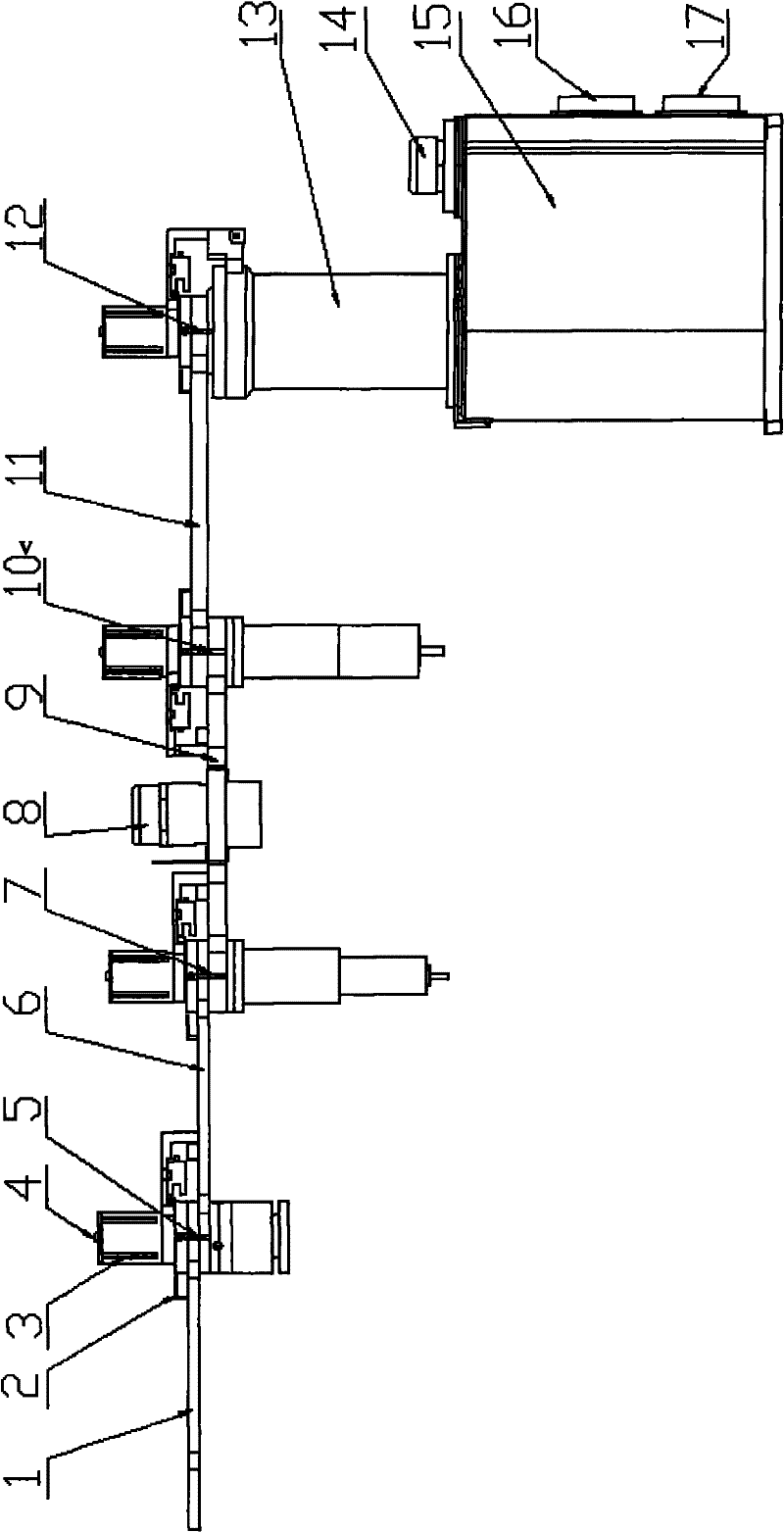
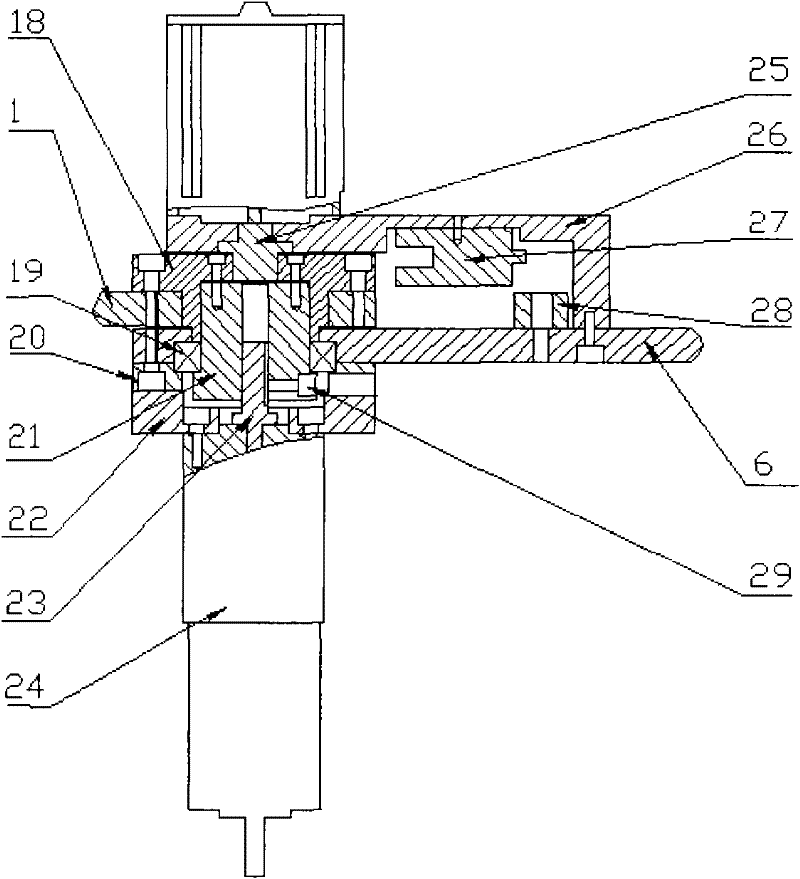
[0033] see figure 1 As shown, the mechanical part of the robot mainly includes the first arm 1, the second arm 6, the third mechanical arm 9, the fourth mechanical arm 11, an encoder, a motor and a base, between each mechanical arm and between the fourth mechanical arm 11 and the The bases 15 are all connected in the form of rotating pairs, and the driving device of the joints adopts a DC brushless servo motor, which has good torque characteristics, high power and a relatively wide speed regulation range. The brake is an electromagnetic brake with power-off braking. The motion controller of the robot adopts the GT-400-SV series servo motion controller developed by Googol Technology Co., Ltd. Figure 9 It is a typical connection diagram of a motion control system composed of GT series controllers. The test bench PC is connected with the motion control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More