

Three-dimension locating method based on three-point collineation marker in video frame
A technology of three-dimensional positioning and positioning mark points, which is applied in the field of tracking and positioning technology, can solve the problems of large visual plane, tracking and registration algorithm limitations, etc., and achieve the effect of natural and reasonable experience and flexible shape design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] 以下针对附图和具体实例对本发明的实施进行具体说明。
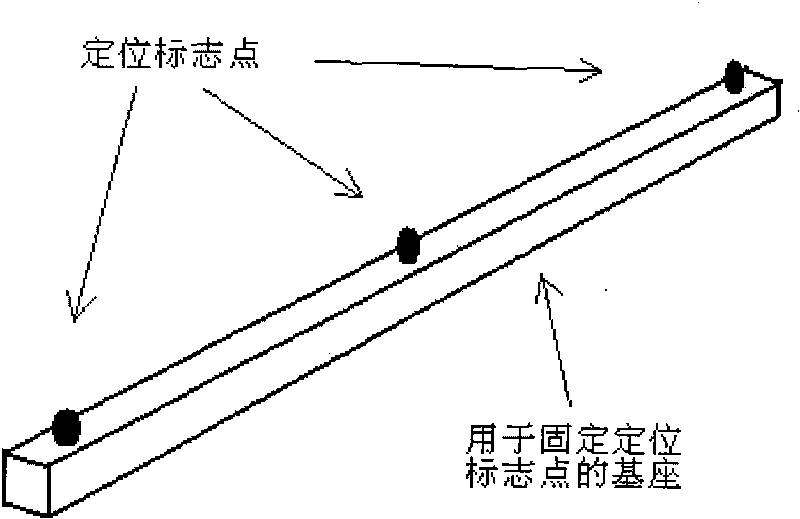
[0016] attached figure 1 是设置三点共线等距排列的定位标记点示意图。标记点设置应满足以下要求:
[0017] 确保应用过程中摄像机对定位标记点的可见性,即定位标记点在具体应用环境中不会被遮挡;定位标记点的间距视具体应用环境而定,根据实际场景中跟踪目标大小与摄像机的视野确定定位标记点间距,定位标记点的间距与目标大小和摄像机的视野为正比关系,一般目标越大、视野越宽,标记点的间距就越大。通常,对于手持式笔形物体的跟踪,在距离摄像机约50厘米范围内的定位标志点的间距,取7到8厘米比较合适,从而保证笔的长度不超过18厘米;标记点能够较容易地从图像中被提取出来,可采用与背景颜色差异较大的LED亮点作为标记点,也可采用与背景有较大颜色差异的圆形标贴。为方便起见,标记颜色一般选红、绿、蓝三元色中的一种。实例中采用绿色LED亮点。例如简单地,可将3个LED以7厘米的距离等间距地安装在一根平直的塑料棒上,如附 figure 1 shown.
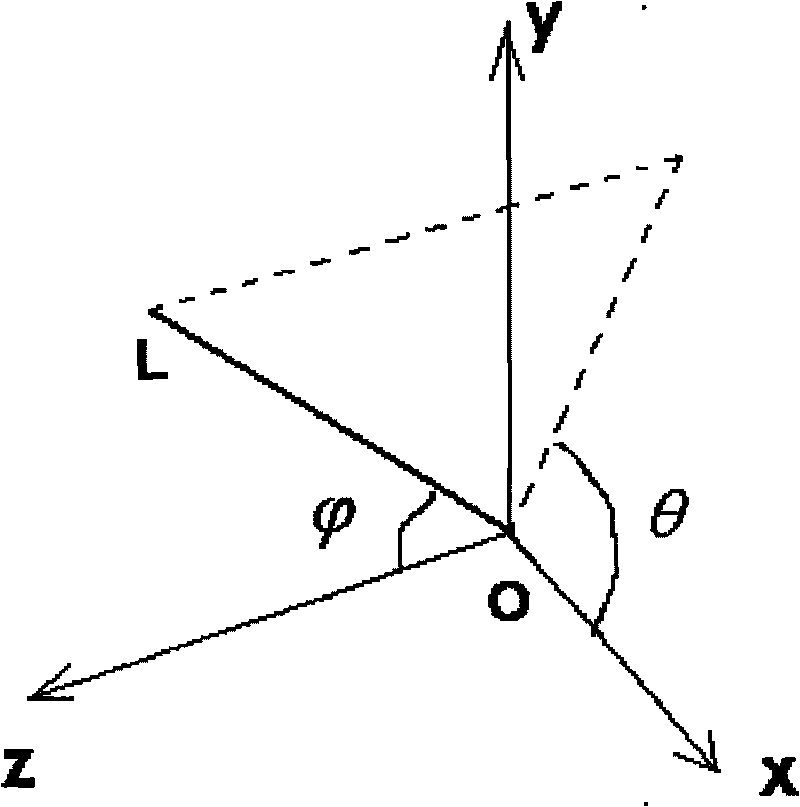
[0018] attached figure 2 是定位标记点对应线段在定位标记坐标系中的位置关系示意图。
[0019] 本实施方案涉及到以下三个坐标系:
[0020] (1)以图像的左上角为原点,水平轴为X轴,垂直轴为Y轴,单位为像素建立图像坐标系,为二维直角坐标系。
[0021] (2)以镜头光心为原点,X轴和Y轴分别与图像坐标系的X轴和Y轴平行,Z轴与图像平面垂直,单位为毫米,建立摄像机坐标系,为三维直角坐标系。
[0022] (3)建立定位标记坐标系,结合附 figure 2 ,设定位标记点所在线段LO的一个端点O为定位标记坐标系的原点,当把定位标记坐标系看成极坐标系时,极轴与摄像机坐标系的X轴平行,LO上的任意一点坐标为 其中l为线段LO上任意一点到原点O的距离, 为线段LO与Z轴的夹角,θ为线段LO到OXY平面的投影与X轴的夹角;当把定位标记坐标系对应为直角坐标系时,X、Y、Z轴分别与摄像机坐标系的X、Y、Z轴平行,LO上的任意一点坐标为[X w , Y w ,Z w ].
[0023] 任一点从极坐标系到直角坐标系的变换式为:
[0024]
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More