

Three-dimensional robot having obstacle detouring function
A degree of freedom, robot technology, applied in the field of robotics, can solve problems such as large volume and complex structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
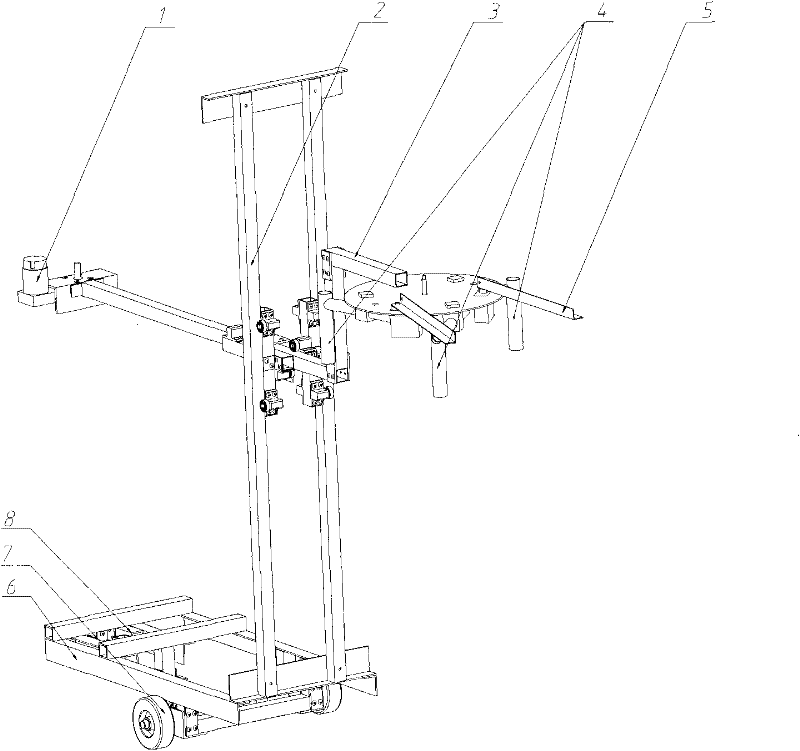
[0018] Implementation Option 1: If figure 1 , it mainly includes traveling mechanism 7, chassis frame 6, frame 2, three-degree-of-freedom manipulator, and it also includes obstacle-crossing walking mechanism 8, support 20, and traveling mechanism 7 is fixed on chassis frame 6 bottoms, and support 20, frame 2 is fixed on the upper part of the chassis frame 6, the obstacle-crossing walking mechanism 8 is fixed on the lower part of the support 20, and the three-degree-of-freedom manipulator is installed on the frame 2.
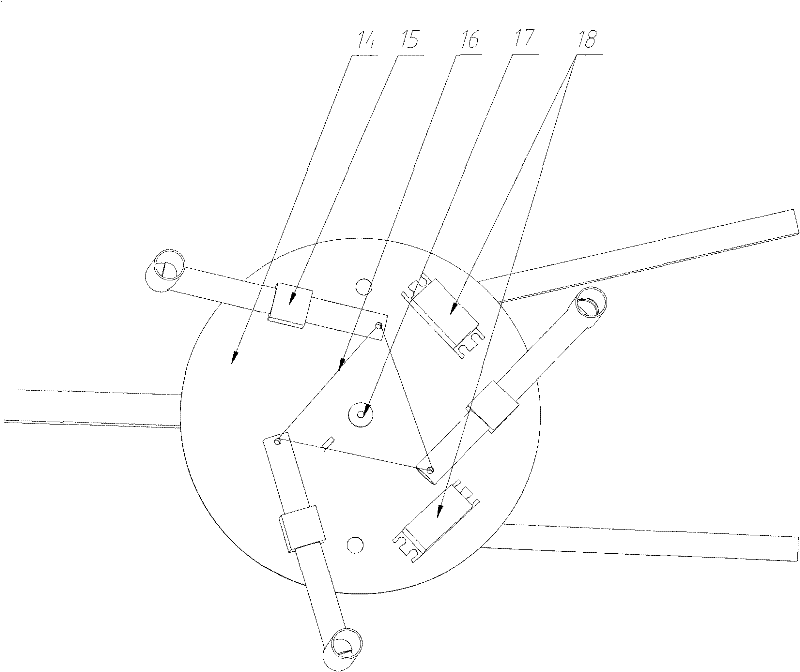
[0019] Such as figure 2 , the obstacle walking mechanism 8 comprises a support 20, a front and rear traveling mechanism 19, a front axle 35, a spring 29, a spring 33, a front fastening device 27, a rear axle 25, a rear fastening device 26, a rubber band 28, a trigger lever 21, a pin rod 31, pin seat 32, reset lever 30, limit lever 34. The obstacle walking mechanism 8 is fixed on the lower end of the support 20, the support 20 is fixed on the chassis frame 6, t...
Embodiment approach 3
[0024] Embodiment 3: An infrared sensor is installed under the obstacle surmounting mechanism 8 and the chassis frame 6 to determine the walking route of the robot. Since the invention requires obstacle surmounting, the sensor located at the obstacle surmounting mechanism 8 can be driven by the motor to rotate to the top after the sensor completes the route planning task, so as not to hinder the obstacle surmounting movement.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More