Multi-vehicle multi-task cooperative control system
A collaborative control and multi-task technology, applied in the field of control systems, can solve the problems of single steering mode, inability to use, and inability to achieve lateral movement, achieving the effect of flexible steering function and reducing the requirements of the use site
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
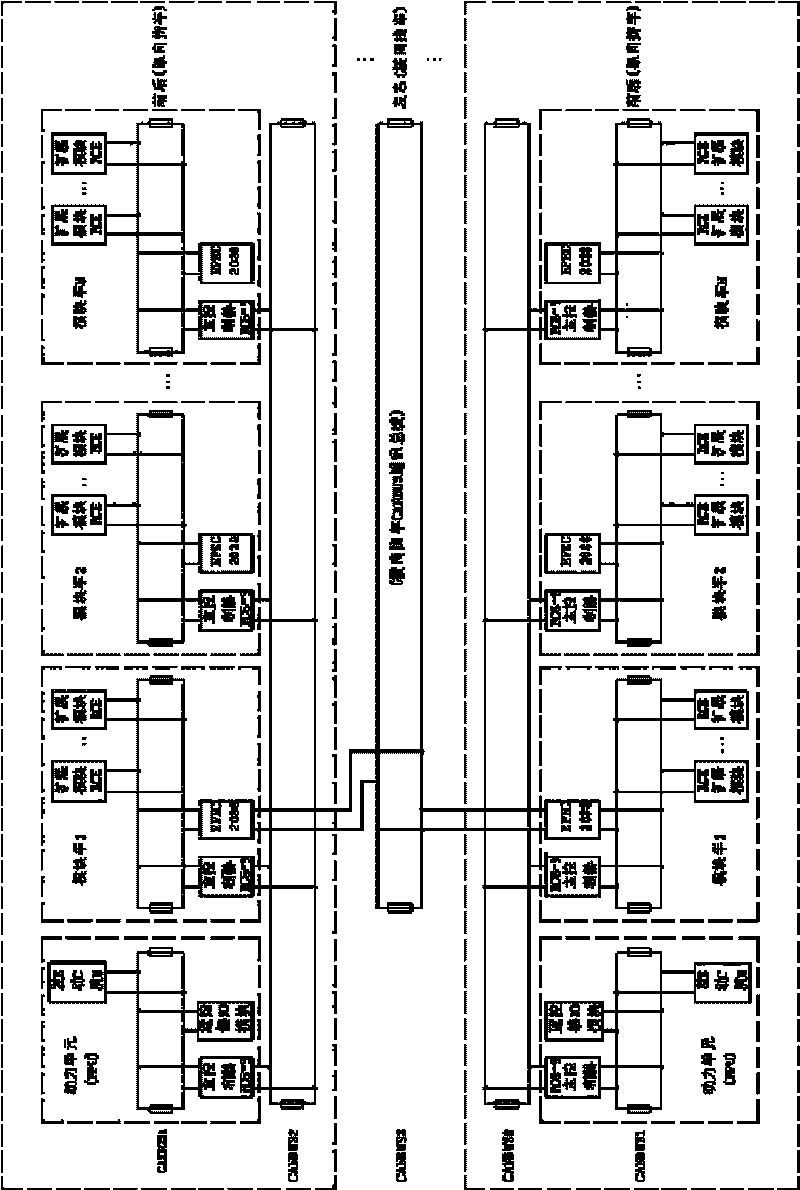
[0037] First, refer to figure 1 The composition and communication schematic diagram of the control system of the present invention are shown, and the hardware equipment of the multi-vehicle multi-task system control system provided by the present invention is selected. In order to meet the use requirements under harsh conditions, we selected the RC6-9 controller with high protection level from Bosch Rexroth as the main controller of the entire control system; due to the large number of input and output ports, we also selected the RC6-9 controller with high reliability The expansion module RCE12-4 controller from Bosch Rexroth Company of Germany; the angle calculation needs to take up a lot of system resources. In order to ensure stability, we chose the 2038 controller with floating point operation function of Finland EPEC company to deal with the angle calculation.
[0038] Next, the communication network of the present invention is constructed: we adopt the CANBUS communicati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com