

Three-dimensional translation and one-dimensional rotation parallel mechanism capable of realizing high-speed movement
A three-dimensional translation, high-speed motion technology, applied in the field of robotics, can solve the problems of increasing the mass of the moving parts of the mechanism, increasing the weight of the moving platform, and the size of the moving platform, reducing the moving mass, compact structure, avoiding steering mechanism and enlargement. Institutional Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
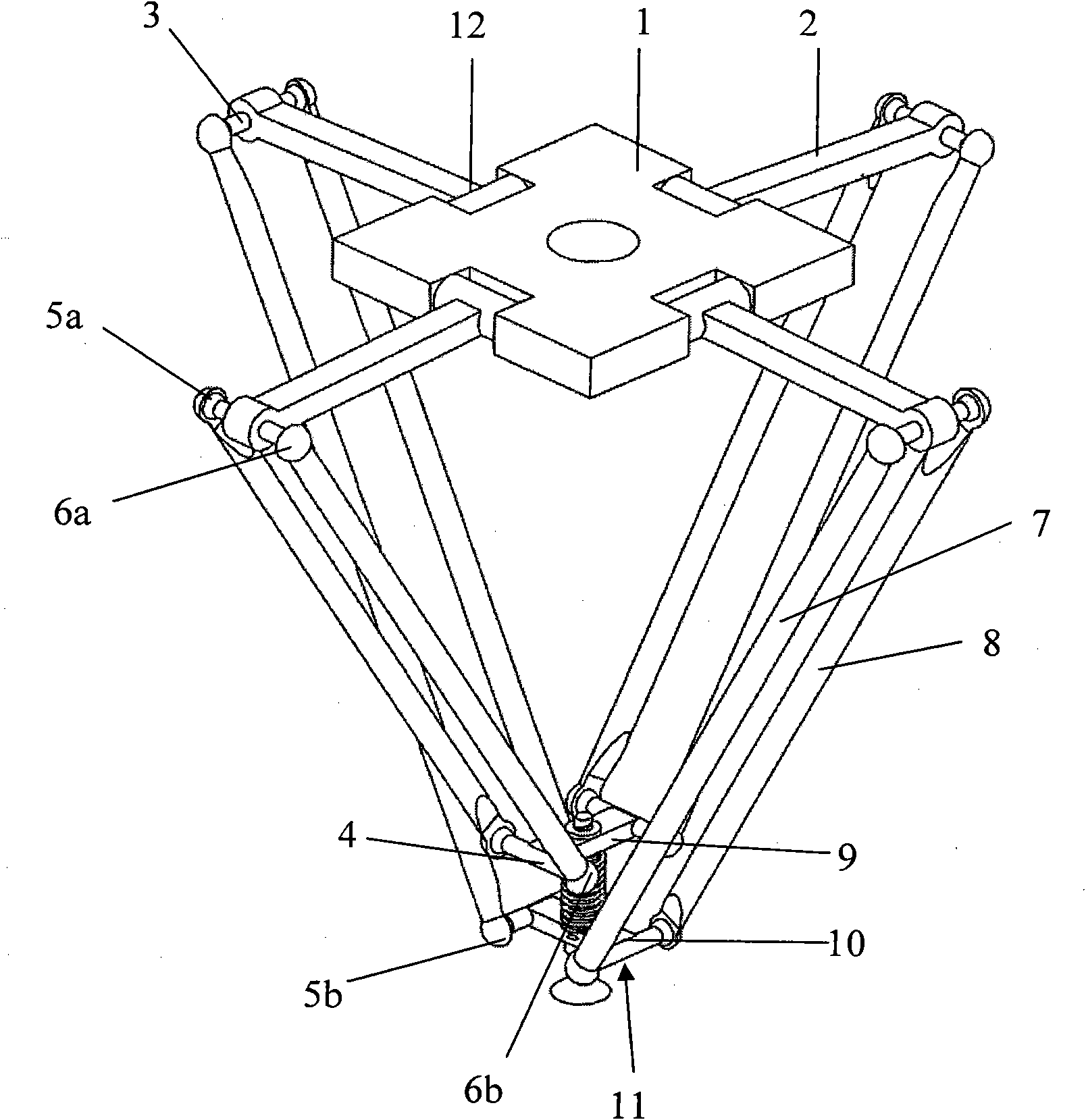
[0015] see Figure 1 ~ Figure 3 , a three-dimensional translation and one-dimensional rotation parallel mechanism capable of high-speed motion, including a fixed frame 1, a moving platform 11, and four branch chains with the same structure symmetrically arranged between the fixed frame 1 and the moving platform 11; each Branch chain comprises nearly frame bar 2, far frame bar I 7, far frame bar II 8 and connects described near frame bar 2 and far frame bar I 7 and last connecting shaft 3 of far frame bar II 8 and connects far frame bar I 7 and the lower connecting shaft 4 of the frame bar II 8 far away, the following connecting shaft 4 on every branch chain, the upper connecting shaft 3 and two parallel far frame bars I 7, far frame bar II 8 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More