Mechanical arm for swarm-robot
A technology of swarm robots and manipulators, applied in the field of manipulators for swarm robots, can solve problems such as single function, and achieve the effect of small size, compact structure and close cooperation mode
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be further described in detail in conjunction with specific embodiments and accompanying drawings.
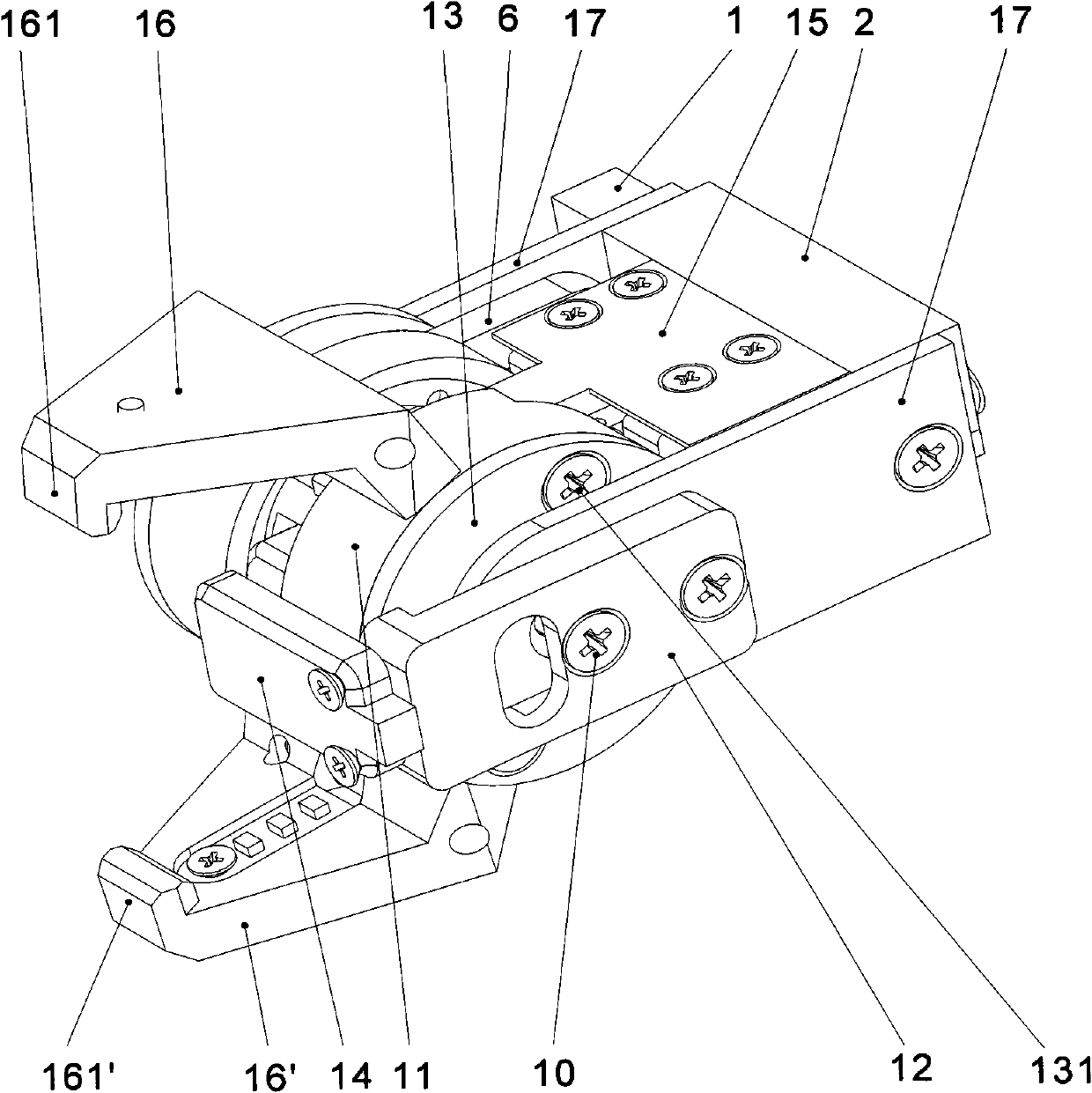
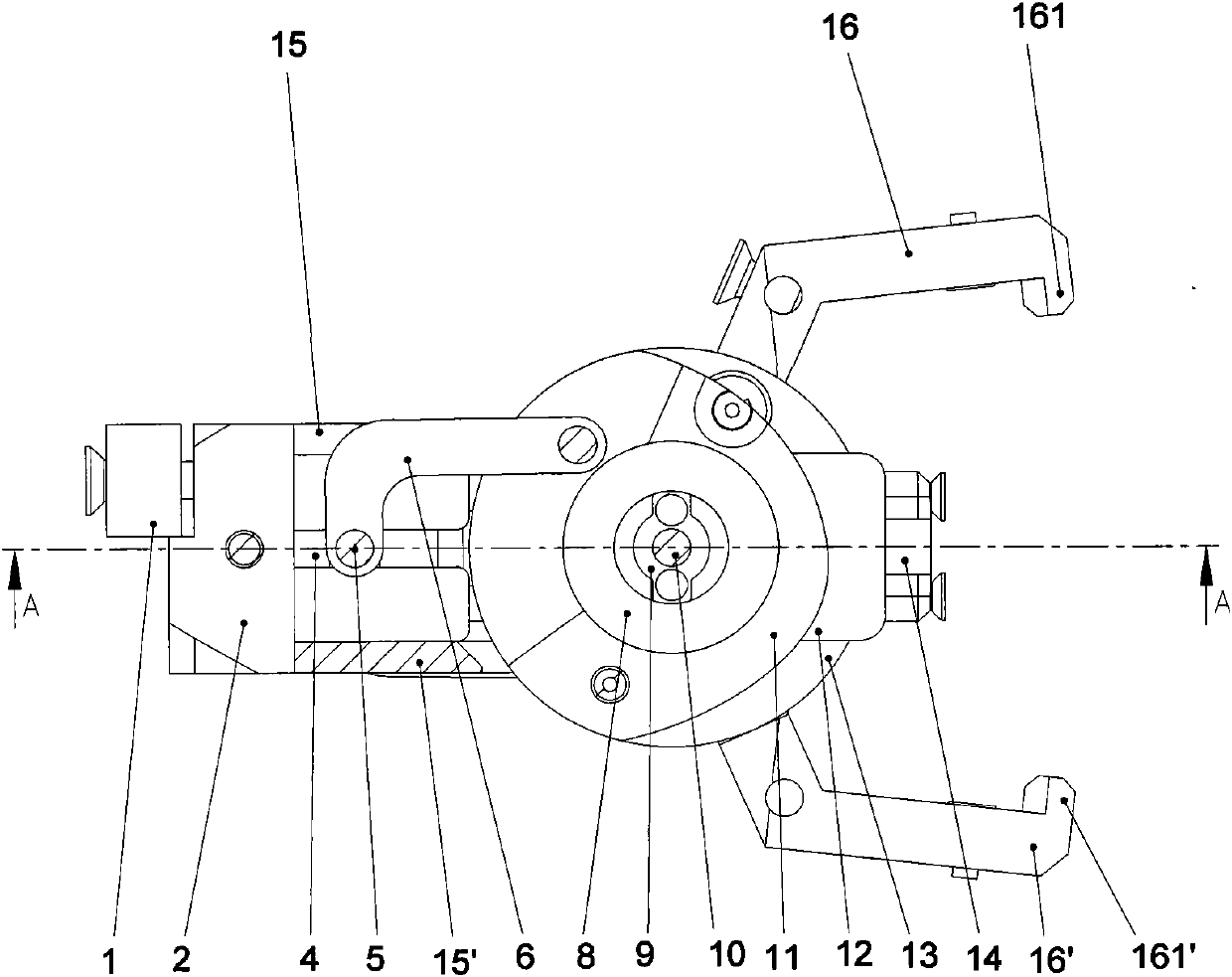
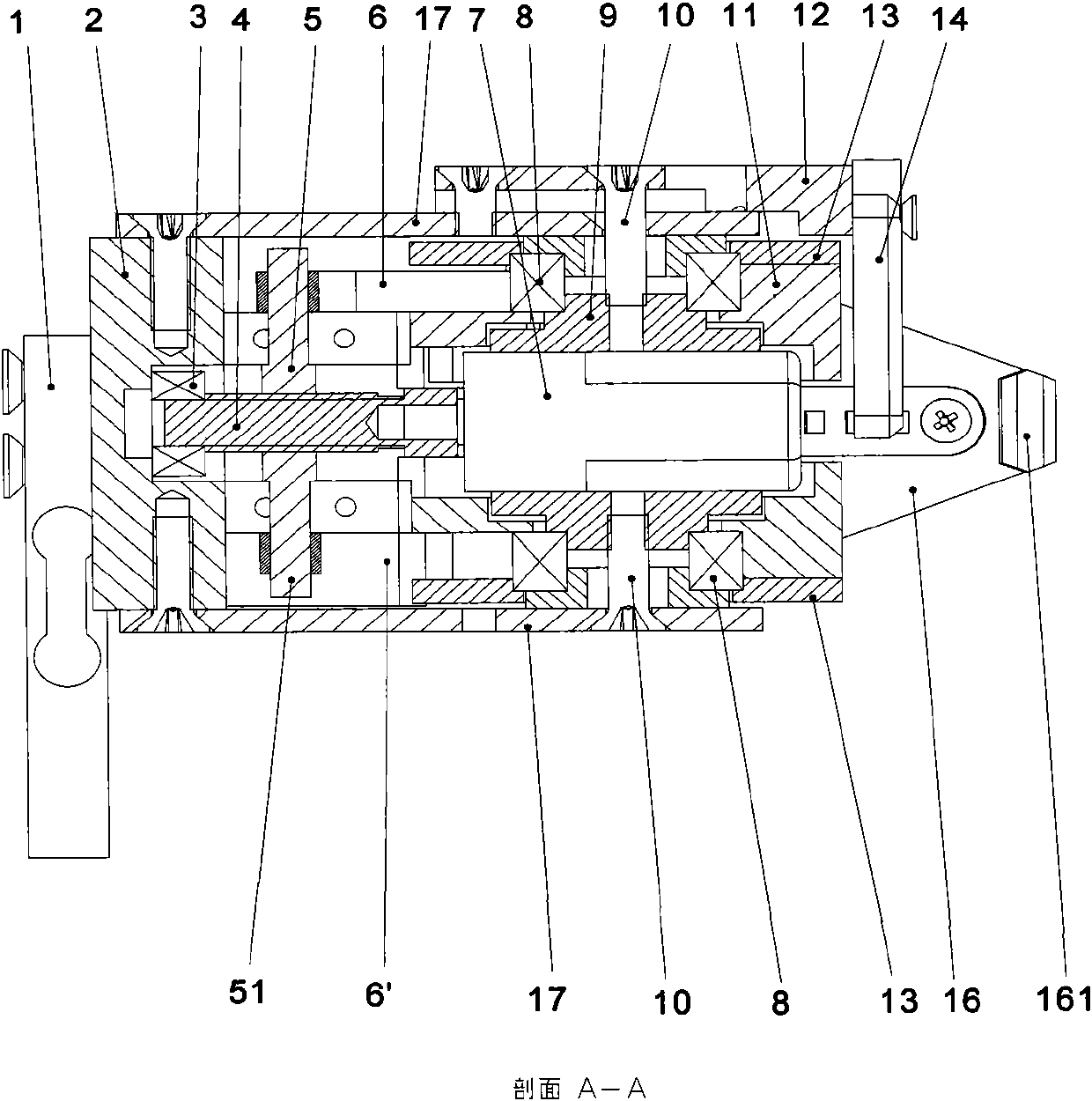
[0014] First please refer to figure 1 In the perspective view of the present invention, the robot arm of the group robot is installed on each single robot in the group robot, and the waist of each single robot is provided with a drag ring that can be grasped. The manipulator for the group of robots includes a support component, a main shaft, a motor, a transmission mechanism, a gripper, a position proximity sensing component and a tension detection component. The jaws include an upper jaw 16 and a lower jaw 16', which are located at the front of the manipulator of the group of robots, and the motor drives the jaws to open and close through a transmission mechanism to grasp the drag of another single robot. circle, the position proximity sensing component is located at the front of the group of robot manipulators, which can sense the distance b...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap