

Foot mechanism of torobot
A hexapod robot and foot technology, which is applied in the field of hexapod bionic robots, can solve the problems of low contact reliability, poor wear resistance, weak adaptability of ellipsoidal feet, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
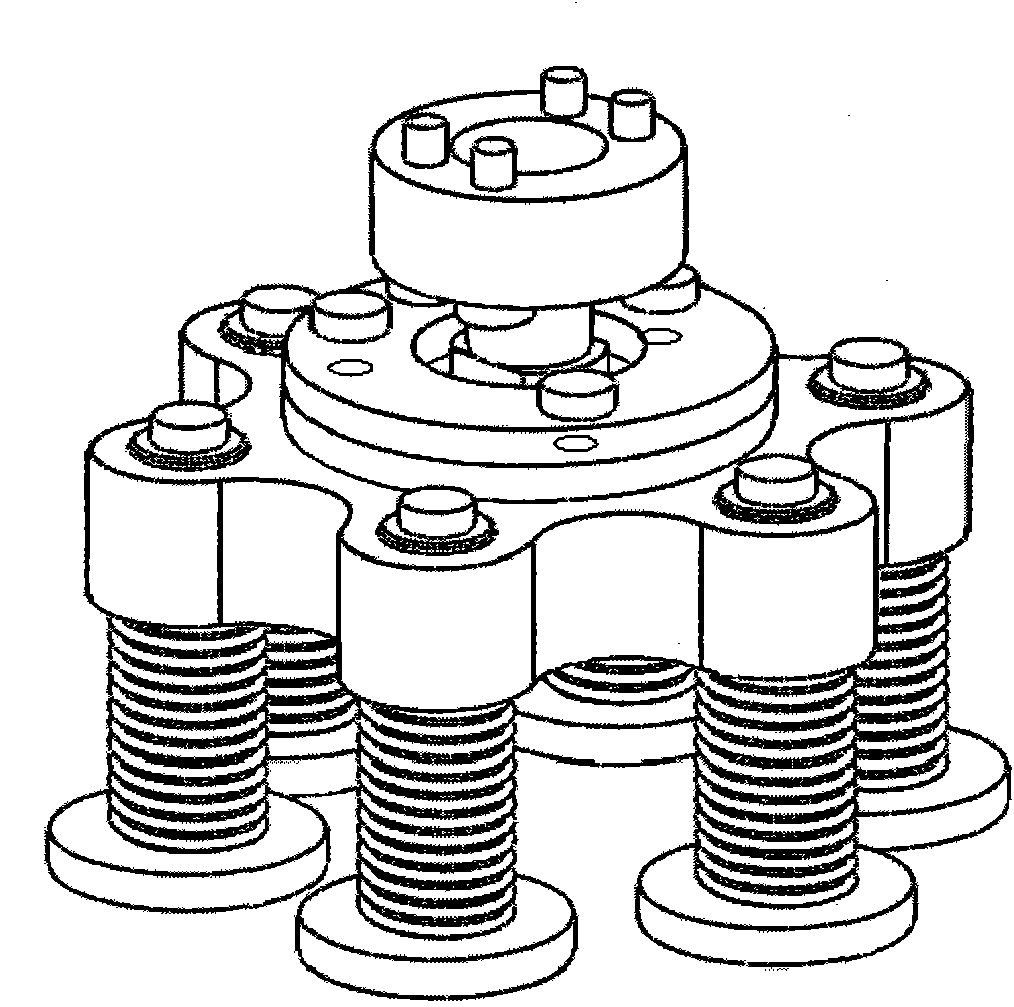
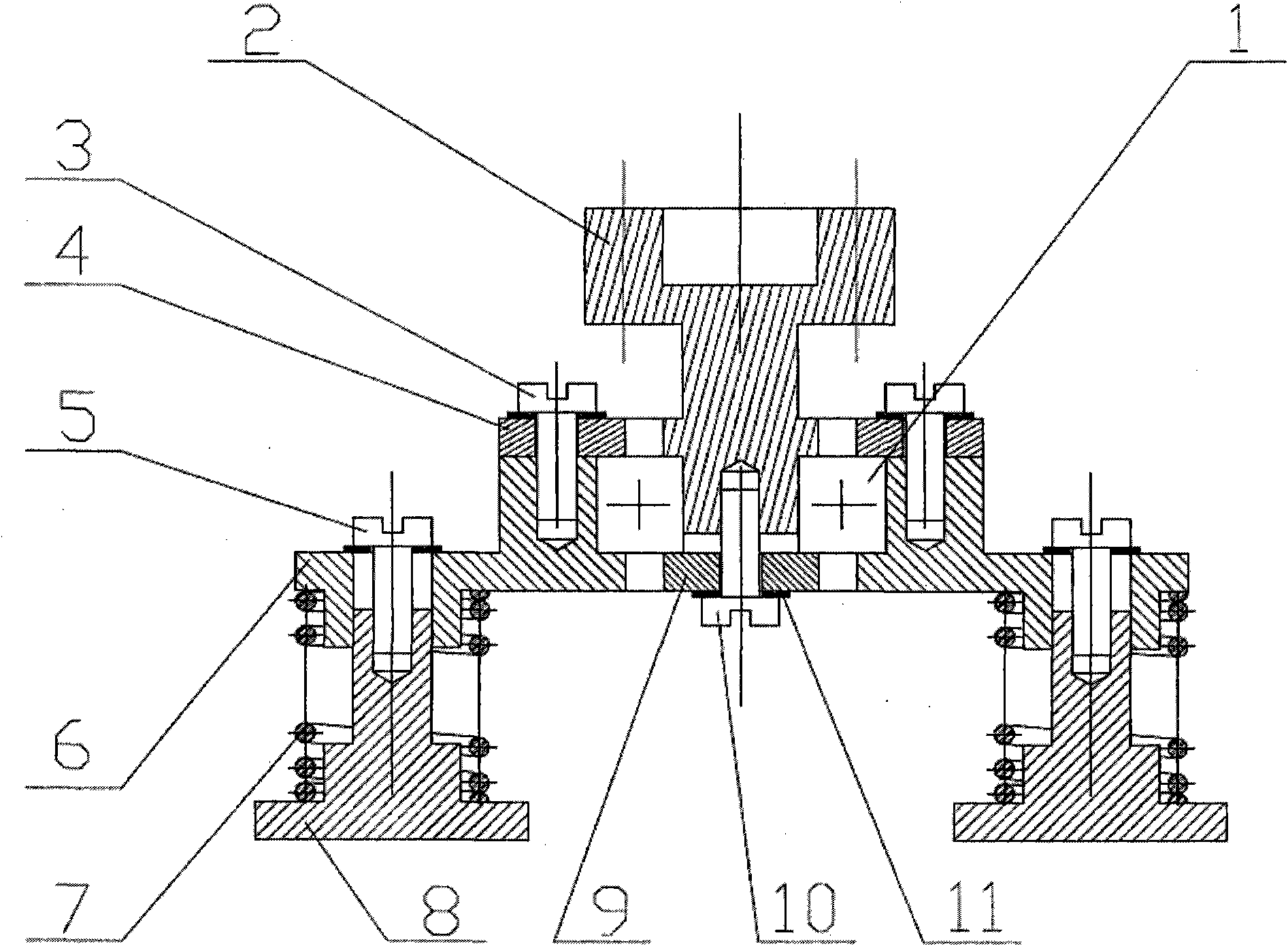
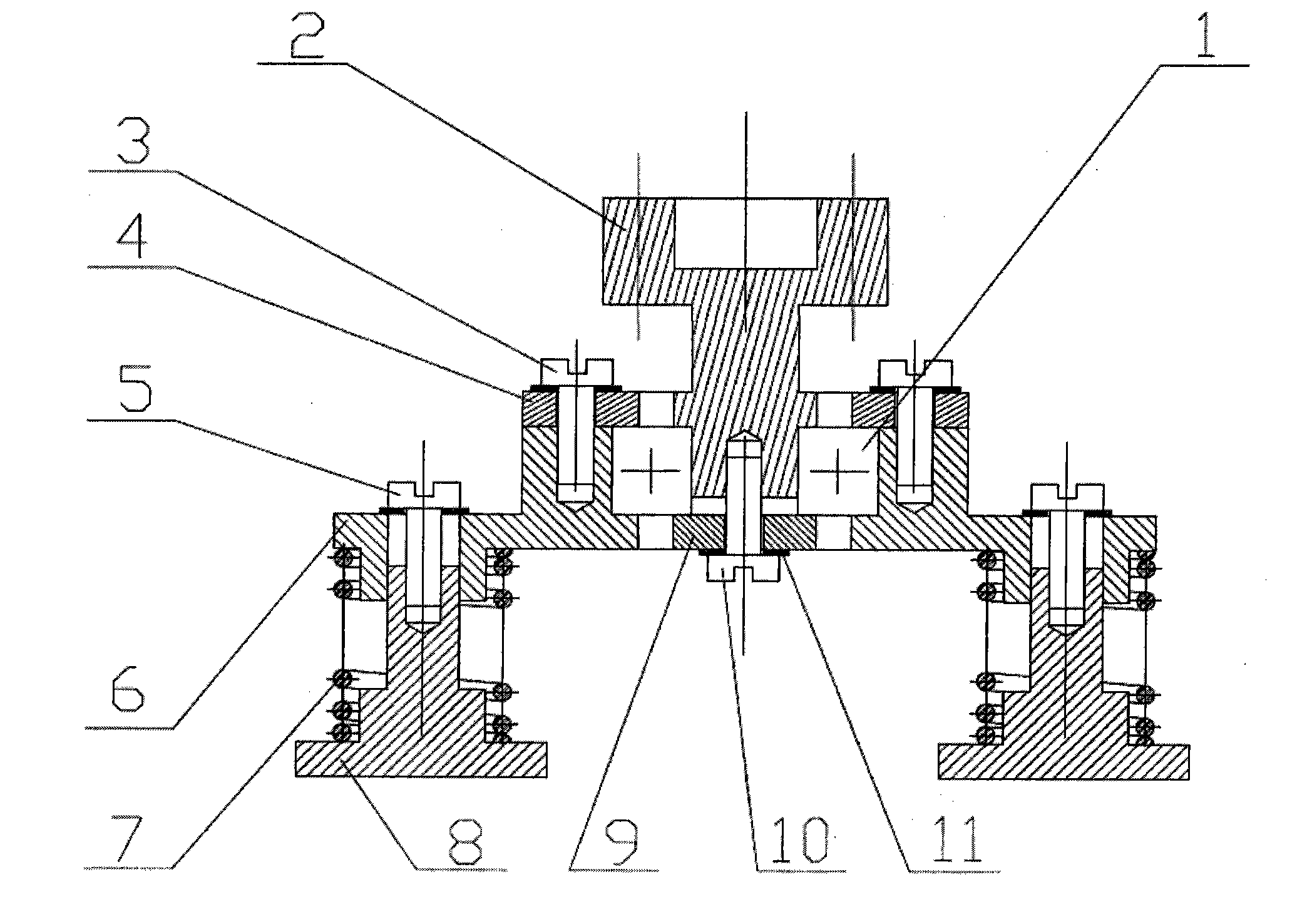
[0008] The present invention consists of an upper interface 2, a deep groove ball bearing 1, a screw 3, an upper baffle 4, an adjusting screw 5, a connecting plate 6, a spring 7, a sole 8, a lower baffle 9, a fixing screw 10, and an anti-loosening washer 11 composition. The upper interface 2 has four through holes as the interface connected with the torso of the hexapod robot. Its bottom cooperates with deep groove ball bearings, so that when the foot mechanism is in contact with the ground, the torso of the robot can still rotate without hindrance, thereby realizing forward movement. The fixing screw 10 is used in conjunction with the gasket 11 and the lower baffle 9, and is connected with the upper interface 2 to fix the inner ring of the bearing 1. The bearing 1 is installed inside the connecting plate 6, and is connected with the connecting plate 6 through the screw 3 and the upper baffle plate 4, so that the bearing works in a fixed state at both ends. The connecting pl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More