

Driver torque request systems and methods
A torque request, driver technology, applied in the driver input parameters, transportation and packaging, electrical control and other directions, can solve the problem of not being able to provide control signals quickly to coordinate engine torque control, and unable to accurately control engine torque output.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The following description is merely exemplary in nature and is in no way intended to limit the disclosure, its application or uses. For purposes of clarity, the same reference numbers are used in the drawings to refer to similar elements. As used herein, the phrase at least one of A, B, and C should be understood to mean a logical (A or B or C), using a non-exclusive logical or. It should be understood that steps within a method may be executed in different order without altering the principles of the present disclosure.
[0068] As used herein, the term module refers to an application-specific integrated circuit (ASIC), an electronic circuit, a processor (shared, dedicated, or grouped) and memory, combinational logic circuits, and / or Or other suitable components that provide the required functionality.
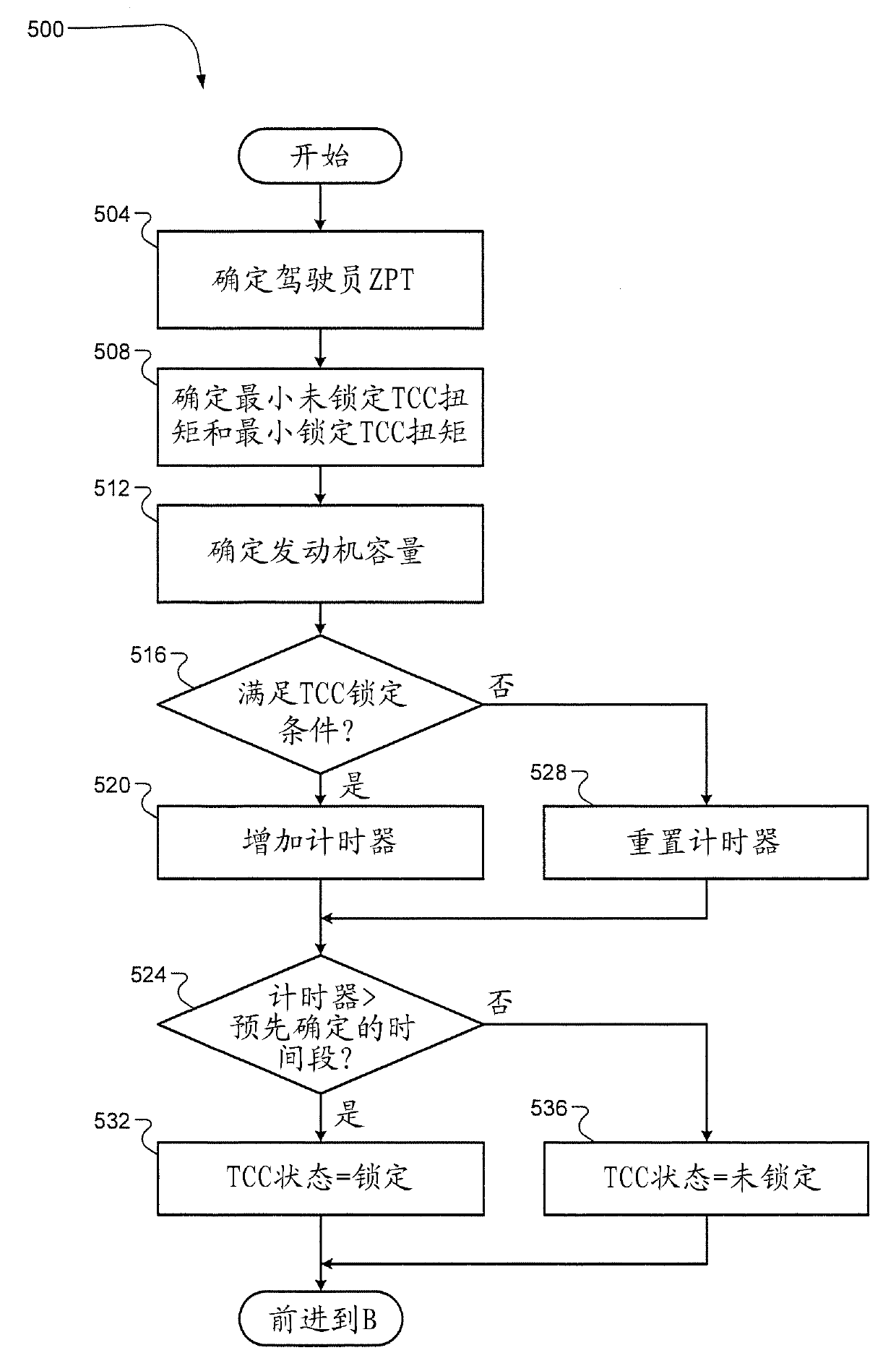
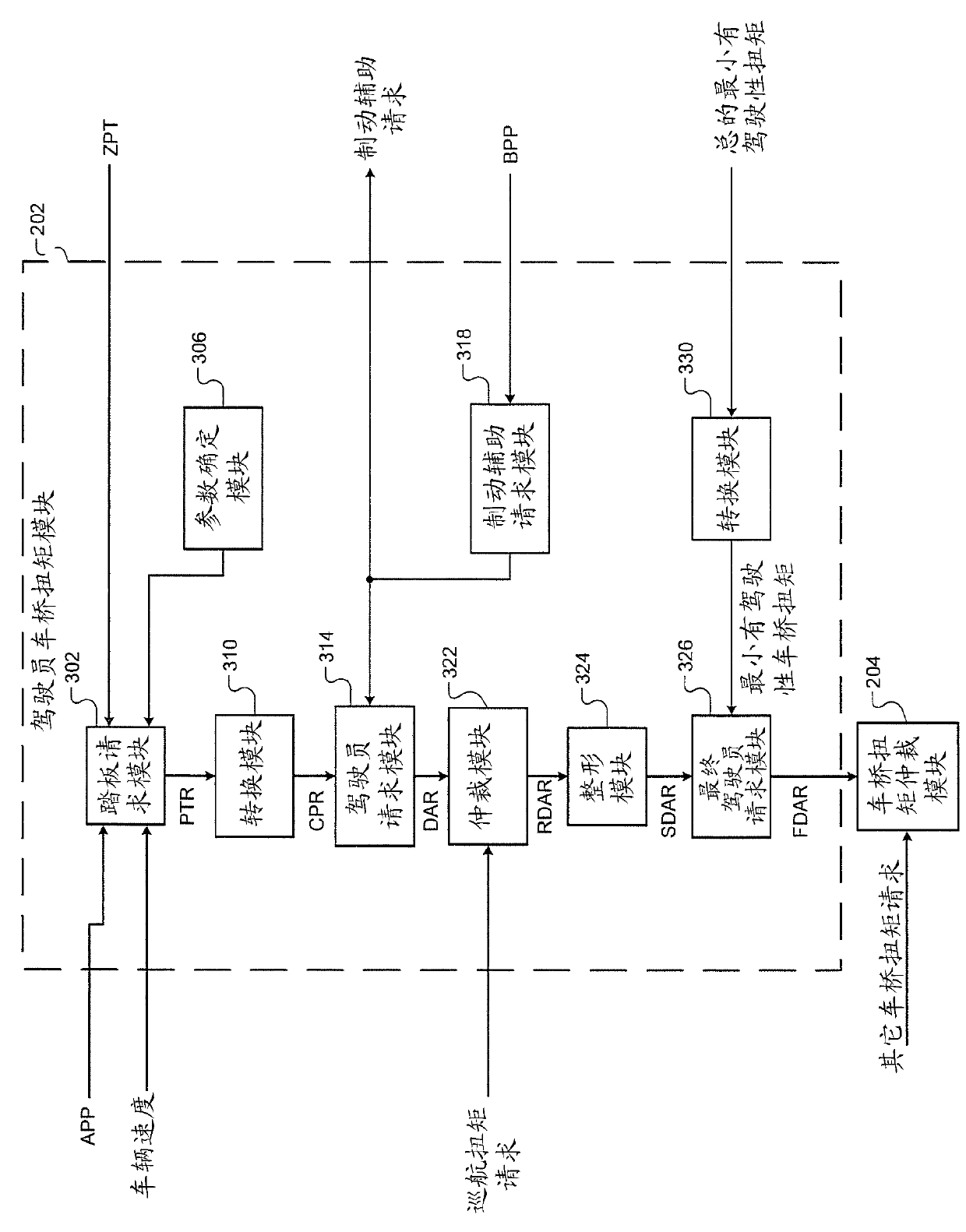
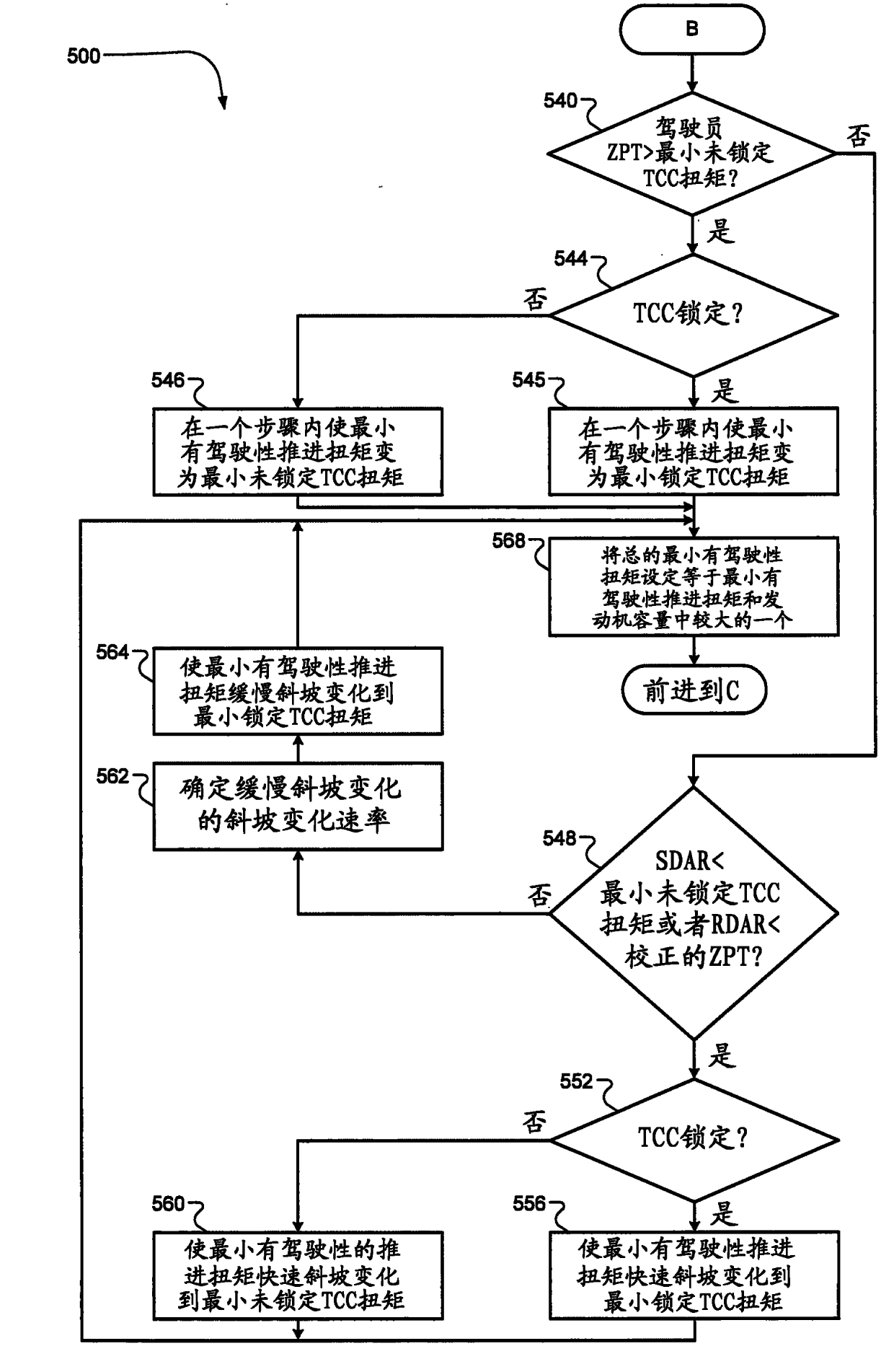
[0069] A control module of the vehicle may control the torque output of the engine based on the final driver axle torque request. The final driver axle torque reque...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More