

Posture compensation method in case of mismatched side-swing push-broom velocity in imaging of agile satellite
A compensation method and satellite technology, applied in the field of attitude compensation, can solve problems such as small imaging range, inability to cover regional targets, and small imaging width of spaceborne remote sensors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
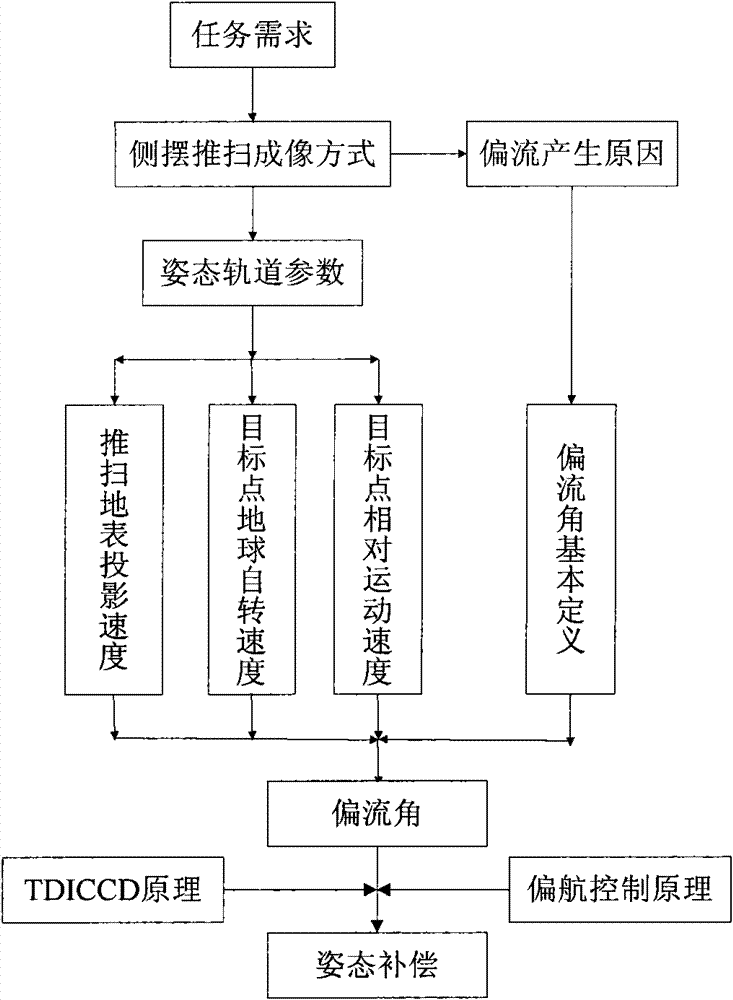
[0041] Such as figure 1 Shown is the flowchart of the method of the present invention. The method of the present invention mainly includes two parts: calculating the drift angle in the push-broom mode perpendicular to the track direction of the sub-satellite point, and the yaw control and compensation of the attitude.
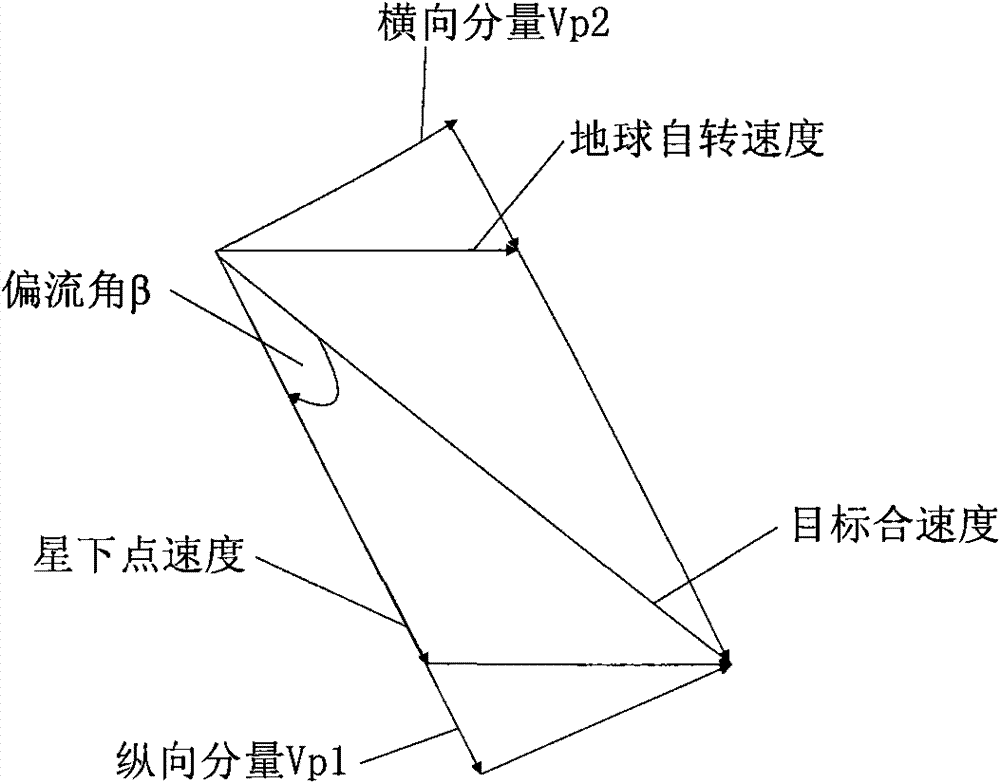
[0042] The essence of the drift angle is the angle between the camera push-broom direction and the target speed direction. The calculation process of the drift angle is as follows:
[0043] (1) Determine the projected velocity of the camera’s push-broom velocity on the surface, the linear velocity of the earth’s rotation at the target point, and the relative moving linear velocity of the target point caused by orbital motion in the east-west pendulum push-broom imaging mode;
[0044] (2) Analyze the cause of the target point closing speed to obtain the target point closing speed;
[0045] (3) Deduce the longitudinal component of the target point-joint velocit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More