

Collision prevention device
A radar device and position prediction technology, which is applied in anti-collision systems, instruments, traffic control systems of road vehicles, etc., to achieve the effect of avoiding collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach )
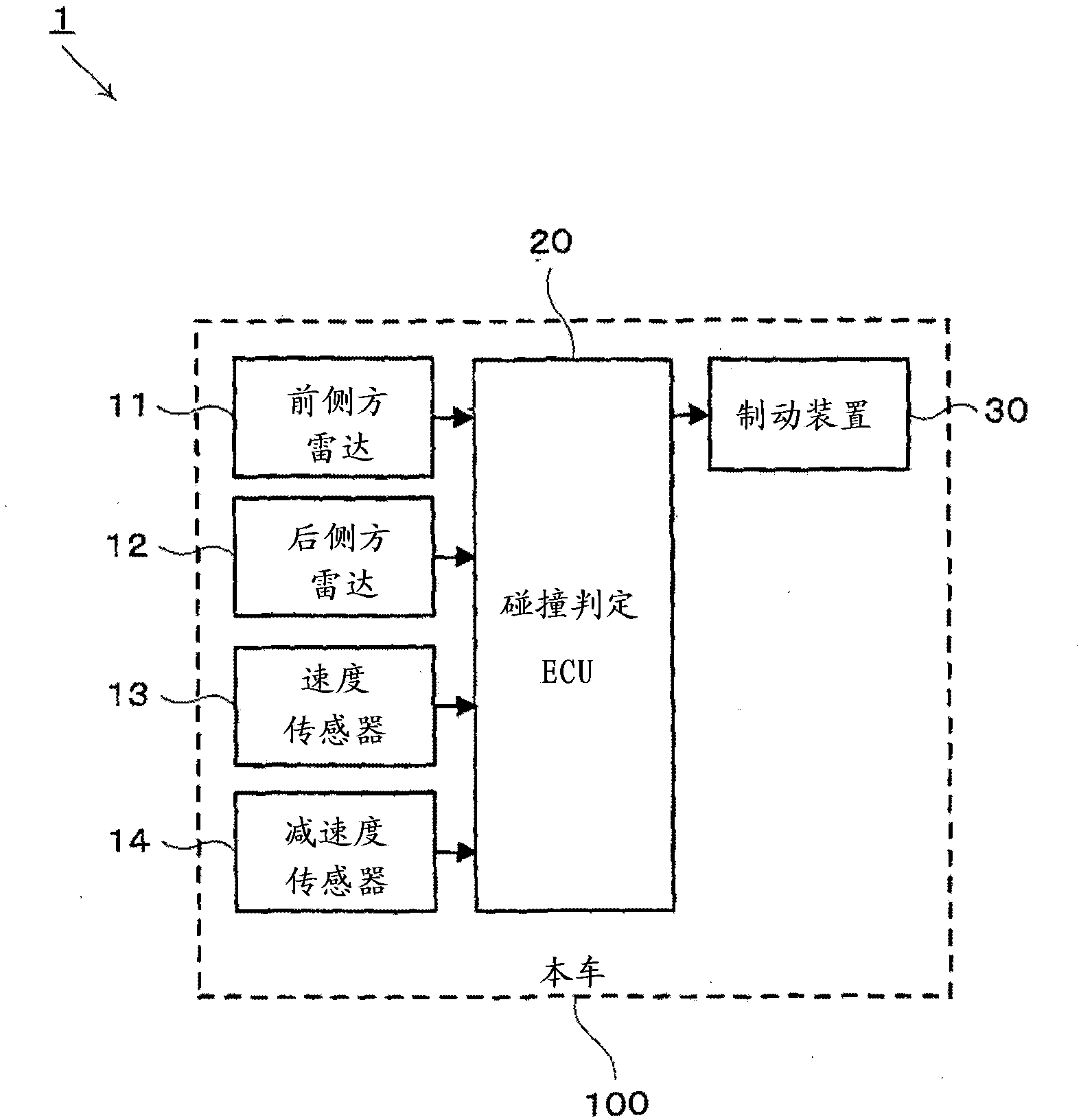
[0038] Hereinafter, the collision prevention device 1 according to the first embodiment of the present invention will be described. First, refer to figure 1 The configuration of the collision prevention device 1 will be described. figure 1 It is a block diagram showing the configuration of the collision prevention device 1 according to the first embodiment of the present invention. The collision prevention device 1 includes a front radar 11 , a rear radar 12 , a speed sensor 13 , a deceleration sensor 14 , a collision determination ECU 20 , and a braking device 30 . In addition, an example in which the collision prevention device 1 is mounted on the own vehicle 100 will be described below.
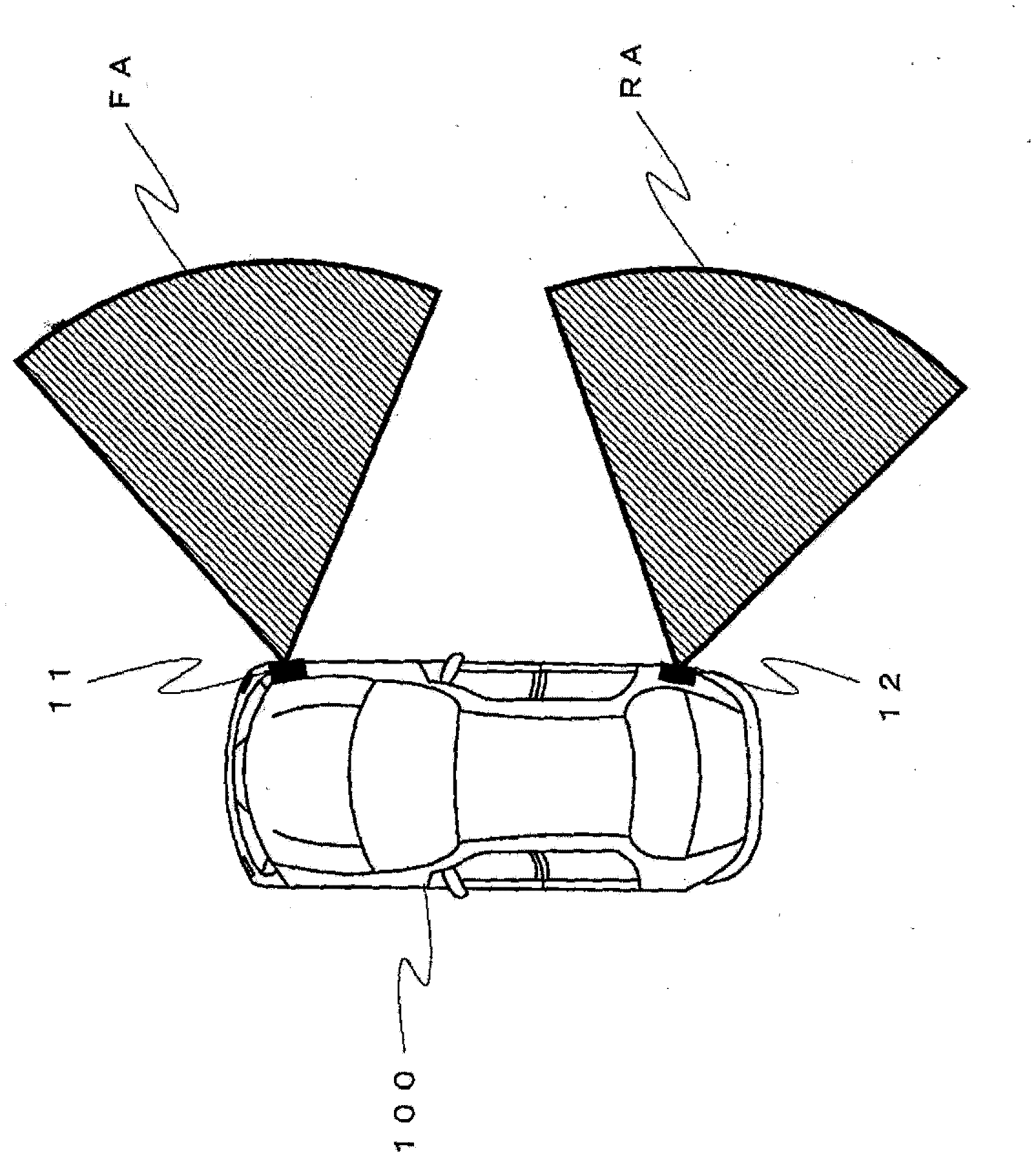
[0039] The front side radar 11 is a radar device that detects an object present in front of the vehicle 100 or approaching from the front side of the vehicle 100 . For example, the front side radar 11 such as figure 2 As shown, it is mounted on the right front portion of the vehicle 1...
no. 2 approach )
[0075] In the above-mentioned first embodiment, the example in which the collision determination ECU 20 controls the braking device 30 to moderate the braking force of the automatic brake to control the acceleration and deceleration state of the own vehicle 100 has been described. However, the collision determination ECU 20 may control the driving device of the own vehicle 100 to accelerate the own vehicle 100 . The collision prevention device 2 according to the present embodiment will be described below.
[0076] Figure 7 It is a block diagram showing the configuration of the collision prevention device 2 according to the second embodiment. Such as Figure 7 As shown, the collision prevention device 2 includes a front radar 11 , a rear radar 12 , a speed sensor 13 , a deceleration sensor 14 , a collision determination ECU 20 , a braking device 30 , and an engine control device 31 . In addition, the same code|symbol is attached|subjected to the same component as the said 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More