

Variable rigidity bionic swinging propulsion unit
A technology of swing device and propulsion device, which is applied in the direction of non-rotating propulsion elements, etc., and can solve the problems of propulsion efficiency and speed gap
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0093] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
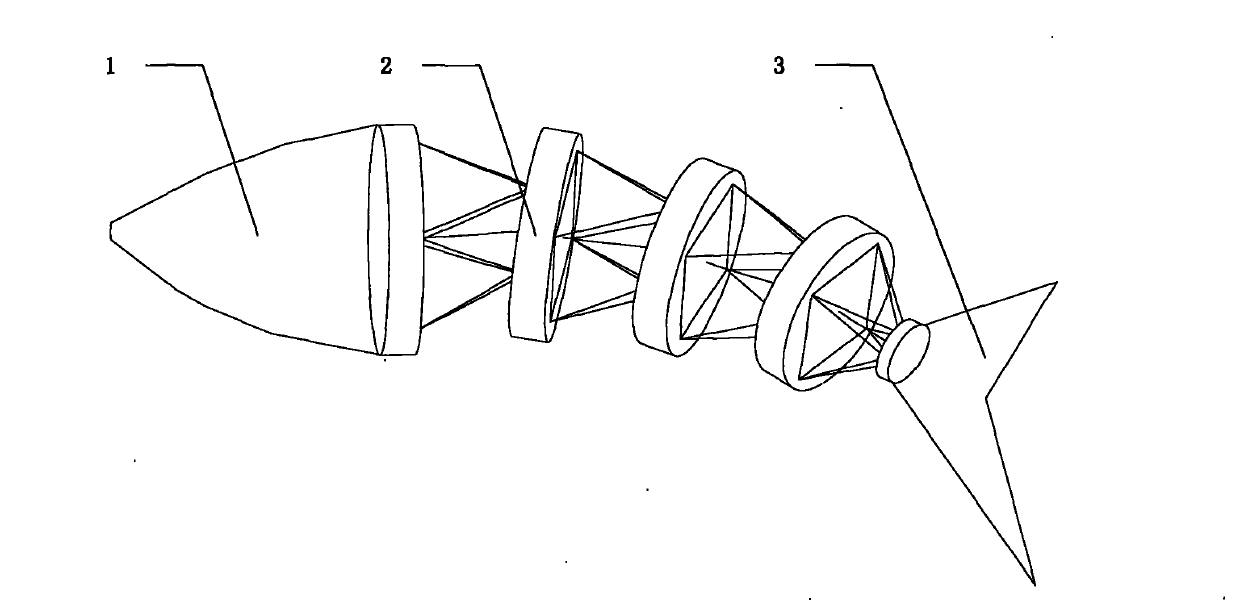
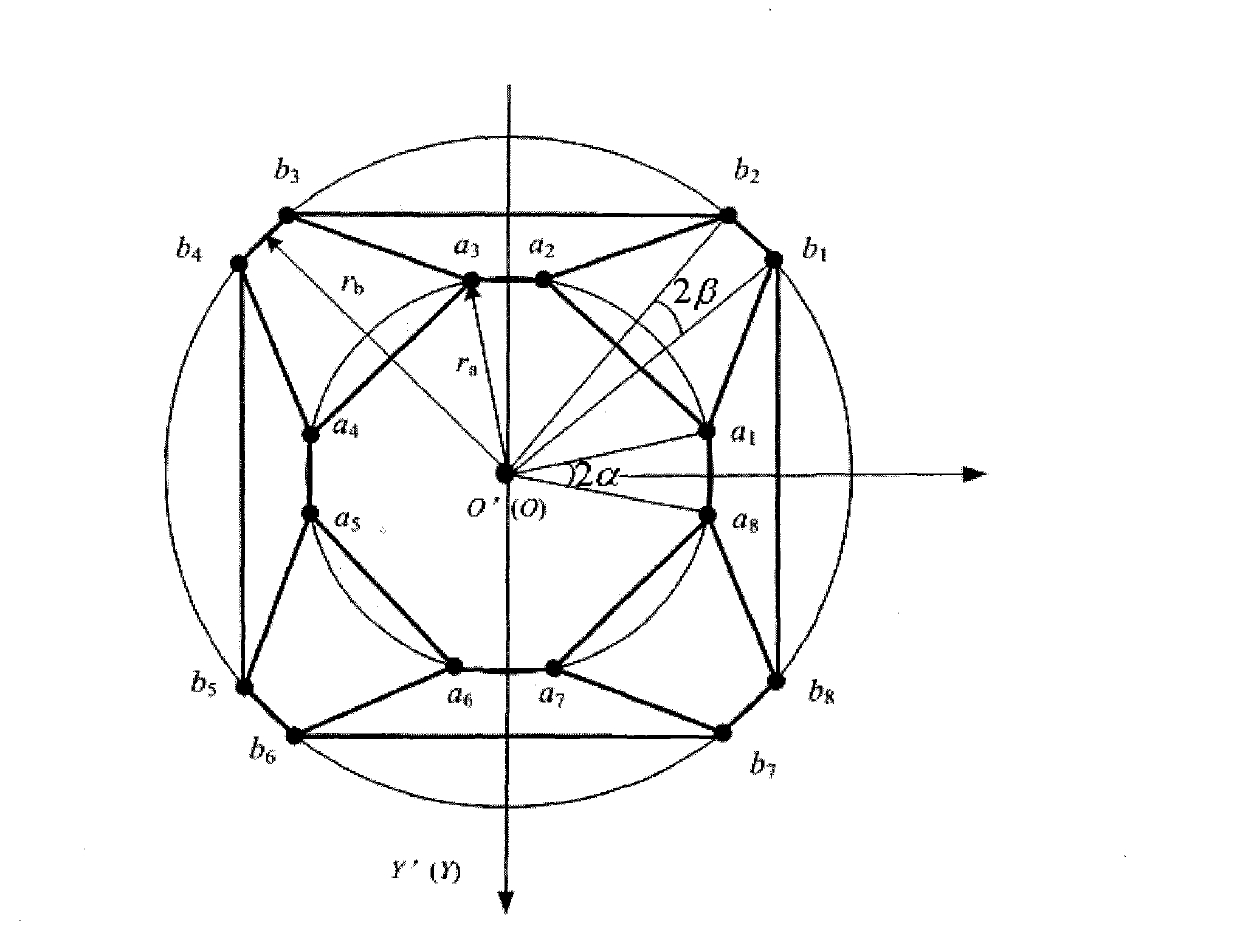
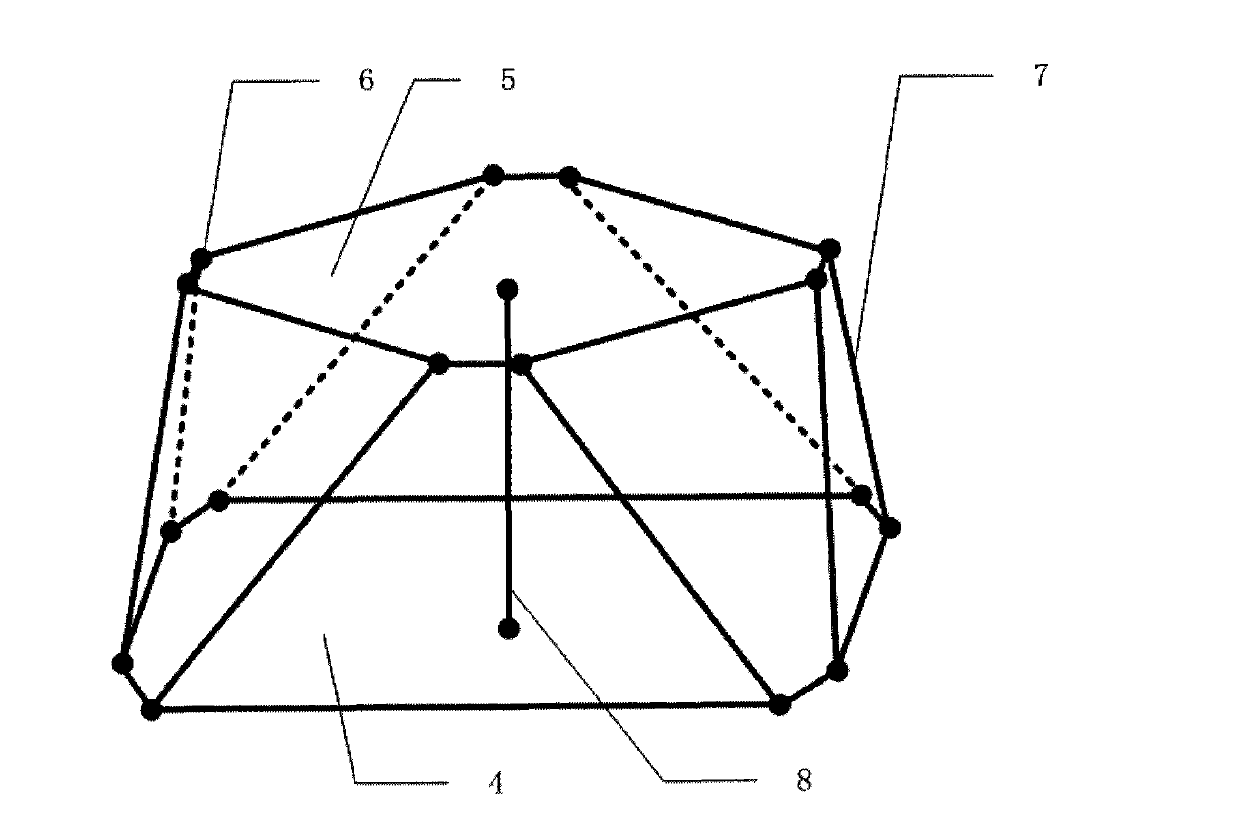
[0094] Such as figure 1 As shown, the variable stiffness bionic swing propulsion device of the present invention. as attached Figure 1-3 As shown, a bionic swing propulsion structure with variable stiffness includes a support, a swing device with more than two sections, and a tail fin. The swing device includes an upper platform, a lower platform, 18 flexible hinge points, 8 outriggers and a spinal column , there is a flexible hinge point o' at the center of the upper platform, and a flexible hinge point o at the center of the lower platform, and the flexible hinge point o' and the flexible hinge point o are connected by the spine;
[0095] There are 8 flexible hinge points distributed on the lower platform at radius r b On the circle whose center is o, these eight flexible hinge points are divided into four groups, and the flexible hinge p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More