

Unmanned aerial vehicle autonomous navigation landing visual target tracking method
An unmanned aerial vehicle, visual autonomous technology, applied in the direction of instruments, character and pattern recognition, computer components, etc., can solve the problem of unreliable tracking of ground targets
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0057] The present invention will be described in detail below with reference to the accompanying drawings and examples.
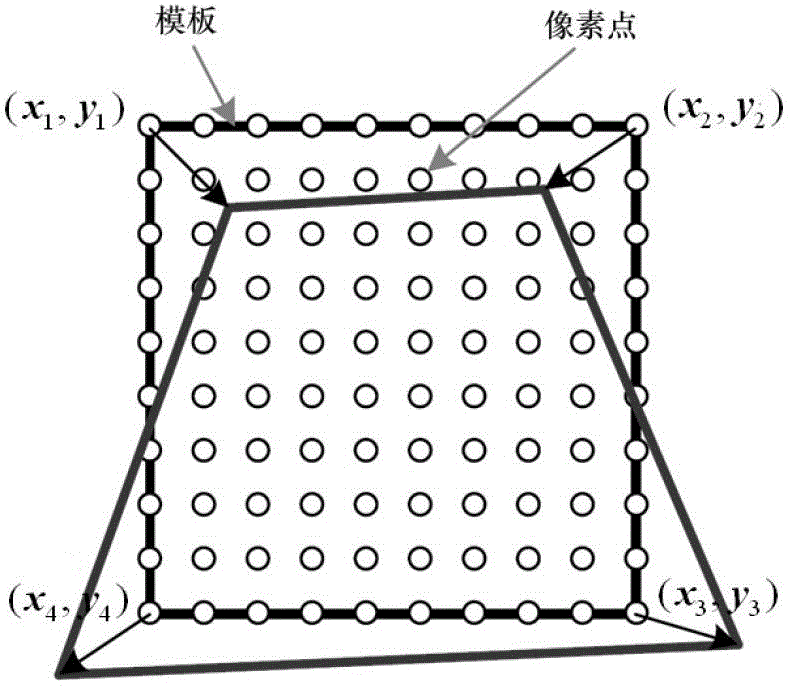
[0058] Step 1. The airborne camera collects the template image of the landing target point and performs affine illumination normalization on the template image to obtain the pixel gray value I of the normalized template image at point x norm (x), where x represents the coordinates of the pixel in the template image;
[0059] For the video sequence, the target motion can be regarded as the three-dimensional motion on the two-dimensional space and the time dimension. For this reason, the gray value of the pixel point of the real-time input image at x=(x, y) at time t is expressed by I(x , t) said. put a certain t x The real-time video image at the moment is selected as the reference image, and for the target area selected in the reference image, a point set containing N elements can be used represent, and the column vector I(x, t) of the image gray value...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More