Movement control way for wheeled robot for seeking nuclear radiation source
A wheeled robot and motion control technology, applied in the field of robotics, can solve the problems of limited convergence range and unrequired convergence speed, and achieve the effect of improving search speed and search range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
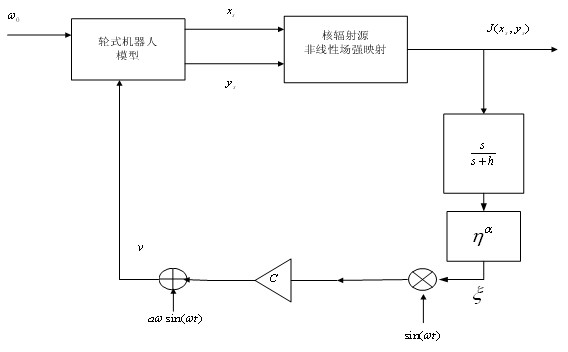
[0025] Image 6 It is a flowchart of a motion control method for a wheeled robot to search for a nuclear radiation source of the present invention, and the specific steps are as follows:
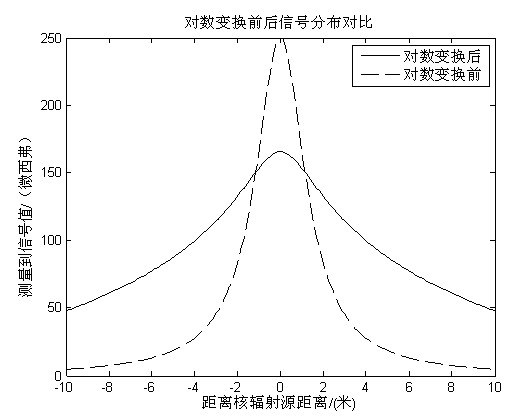
[0026] a) Nuclear radiation intensity measurement and logarithmic transformation
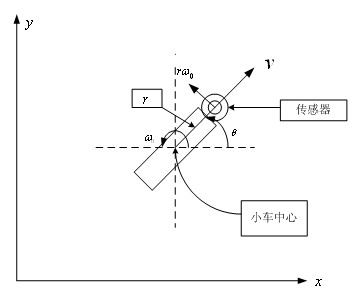
[0027] The intensity of nuclear radiation is measured by the nuclear radiation sensor that comes with the wheeled robot. The kinematic model of wheeled robot such as figure 2 shown. figure 2 The position, linear velocity, angular velocity, and sensor locations of the wheeled robot model are shown. Depend on figure 2 It can be seen that the motion equation of the robot center is
[0028]
[0029] in is the center of the wheeled robot, is the angle between the central axis of the robot and the x-axis of the global coordinates, , are the linear velocity and angular velocity inputs of the robot, respectively. In the present invention only the line speed is adjusted , angular velocity input ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More