

Leg buffer structure of walker
A cushioning structure and walker technology, applied in the field of robots, can solve the problems of single direction of action, poor shock absorption effect, easy self-locking, etc., and achieve the effect of convenient operation, high flexibility and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described in detail below in conjunction with the accompanying drawings.
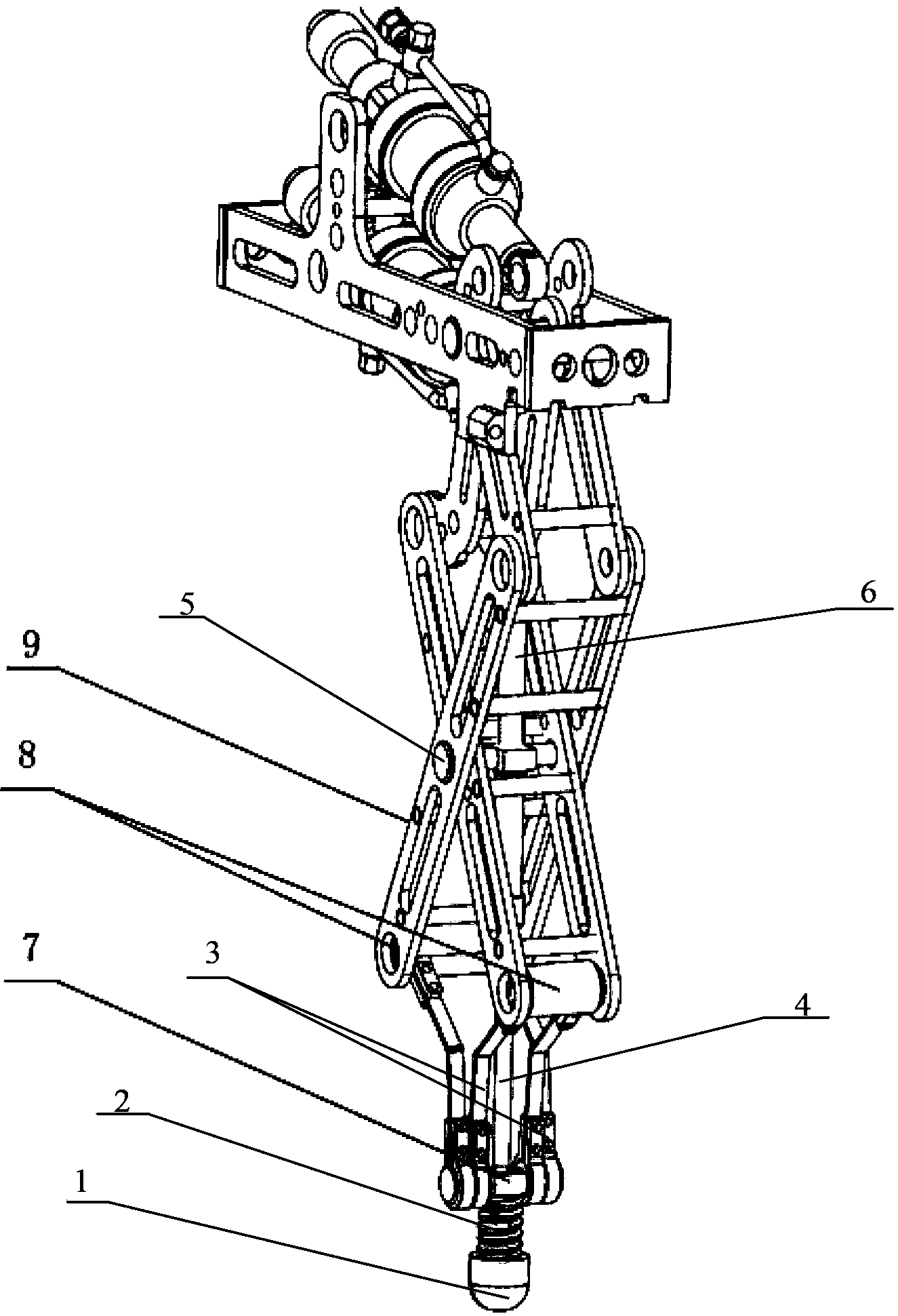
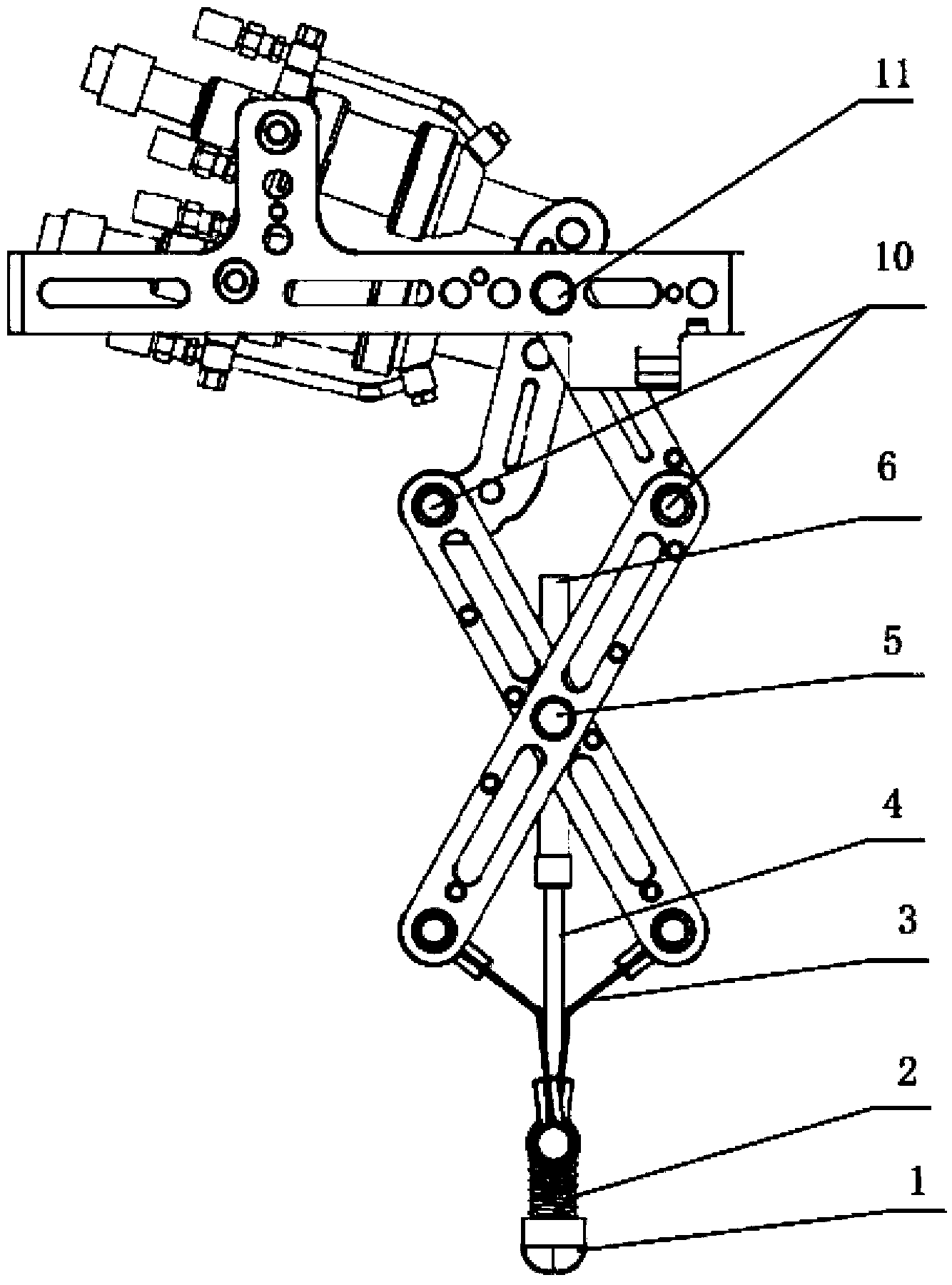
[0017] Please also see figure 1 and figure 2 , a leg cushioning structure for a walker, comprising: toe 1, spring 2, two sets of torsion spring sheets 3, guide rod 4, central leg connecting shaft 5, sleeve 6, toe connecting shaft 7, first leg 8, a number of leg members 9, a second leg connection shaft 10, a hip connection shaft 11 and a number of hip connections. There is a guide hole in the middle of the toe connecting shaft 7, one end of the guide rod 4 penetrates through the guide hole and is fixedly connected with the toe 1, and the spring 2 is arranged between the toe 1 and the toe connecting shaft 7 and socketed with the guide rod 4 connection, the other end of the guide rod 4 is partially sleeved into the guide rod sleeve 6 and can slide freely, the guide rod sleeve 6 is connected to the middle part of the central leg connecting shaft 5, two sets of torsion...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More